A bionic flexible arm with multi-degree-of-freedom segmental control in space based on metamorphic mechanism
A metamorphic mechanism and bionic flexibility technology, applied in the field of bionic robots, can solve the problems that the overall telescopic and segmental control of the manipulator cannot be realized, and the number of effective components and degrees of freedom of the manipulator cannot be changed, so as to enhance flexibility and adaptability , to achieve the effect of effective number of components and size reduction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
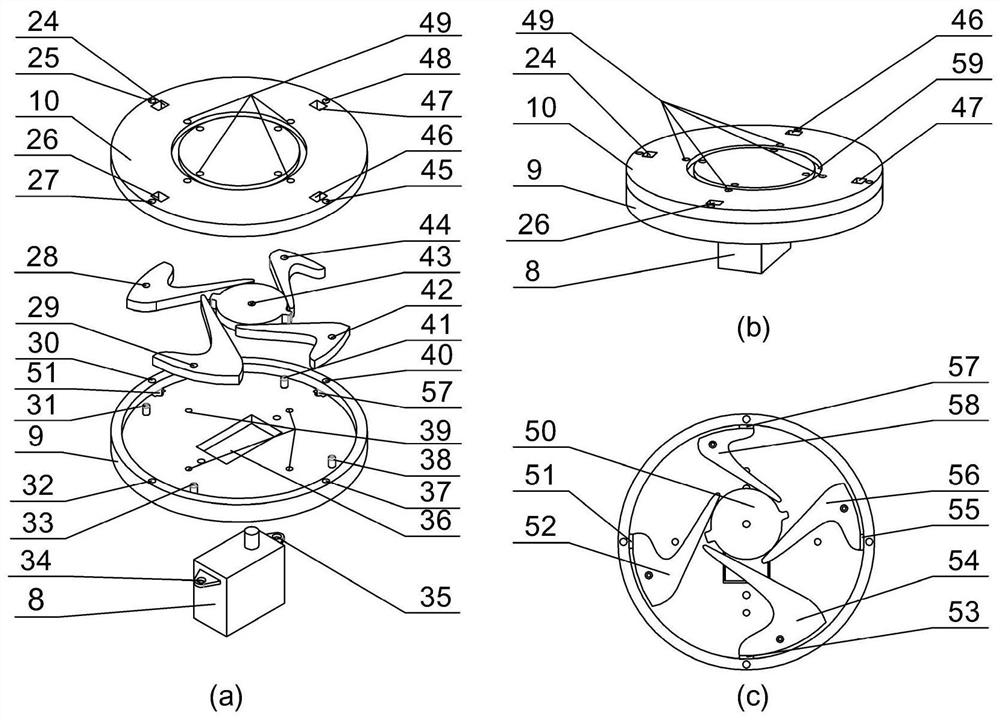
[0033] The preferred embodiment of the present invention provides a bionic flexible arm with multi-degree-of-freedom segmental control in space based on metamorphic mechanism, such as figure 1 As shown, it includes a drive mechanism connected with a rope and several flexible mechanisms. The flexible mechanisms are connected by a section mechanism. After the rope passes through the section mechanism, it is fixedly connected with a fixed assembly. The lock release mechanism is provided with a steering gear for driving the lock release mechanism to lock and release the rope on the segmented housing. Wherein, the fixed assembly adopts the fixed block 11, and the driving mechanism includes a box body and a drive motor a3, a drive motor b5, a drive motor c21, and a drive motor d23 fixed on the box body by the fixing frame 4, and the box body includes a box body front cover 20, The box body back cover 1 and 4 fixing brackets 4 fixedly connecting the box body front cover 20 and the bo...
Embodiment 2
[0036] On the basis of the first embodiment, the fixing component adopts the joint mechanism c with the same structure as the joint mechanism a, and the rope a7, the rope b6, the rope c17, and the rope d19 pass through the joint mechanism a, the joint mechanism b, and the joint mechanism in sequence After c, it is fixedly connected with the lower end cover 10 of the section mechanism c. By adopting the segmented mechanism as the fixed component, it is convenient to directly control the flexible mechanism farthest from the driving mechanism, and the flexibility of the flexible arm is improved.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com