Automatic double eyelid surgery robot
A surgical robot and double eyelid technology, applied in the field of medical cosmetology, can solve the problems of large labor requirements, long operation time, and the inability of the device to achieve autonomous cutting, etc., to achieve the effect of improving the degree of freedom and sensitivity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The technical solutions of the present invention will be further specifically described below through the embodiments and in conjunction with the accompanying drawings.
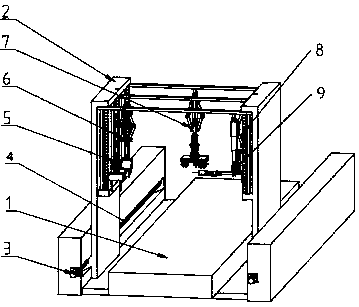
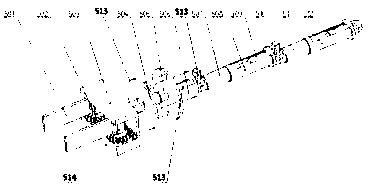
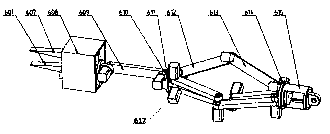
[0022] Such as figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Image 6 , Figure 7 , Figure 8 As shown, a kind of automatic double eyelid surgery robot comprises operating table 1, telescopic table 2, the first stepping motor 3, front and rear telescopic screw rod 4, folder eyelid part 5, extracting part 6, sewing needle part 7, cutting Opening part 8, anesthesia part 9; eyelid clip part 5 comprises: eyelid splint 501, eyelid gear 502, splint cover 503, splint slewing frame 504, telescopic screw mandrel 505, telescopic screw mandrel seat 506, first electric cylinder telescopic rod 507, The first telescopic seat 508, the first electric cylinder 509, the second electric cylinder telescopic rod 510, the second telescopic seat 511, the second electric cylinder 512, the second stepping mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com