Dynamics modeling and solution method of tree chain robot based on axis invariant
A technology of dynamics and robotics, applied in the field of robotics, can solve problems such as the inability and difficulty to guarantee the reliability and accuracy of high-degree-of-freedom system dynamics engineering, the modeling process and the complexity of model expression
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
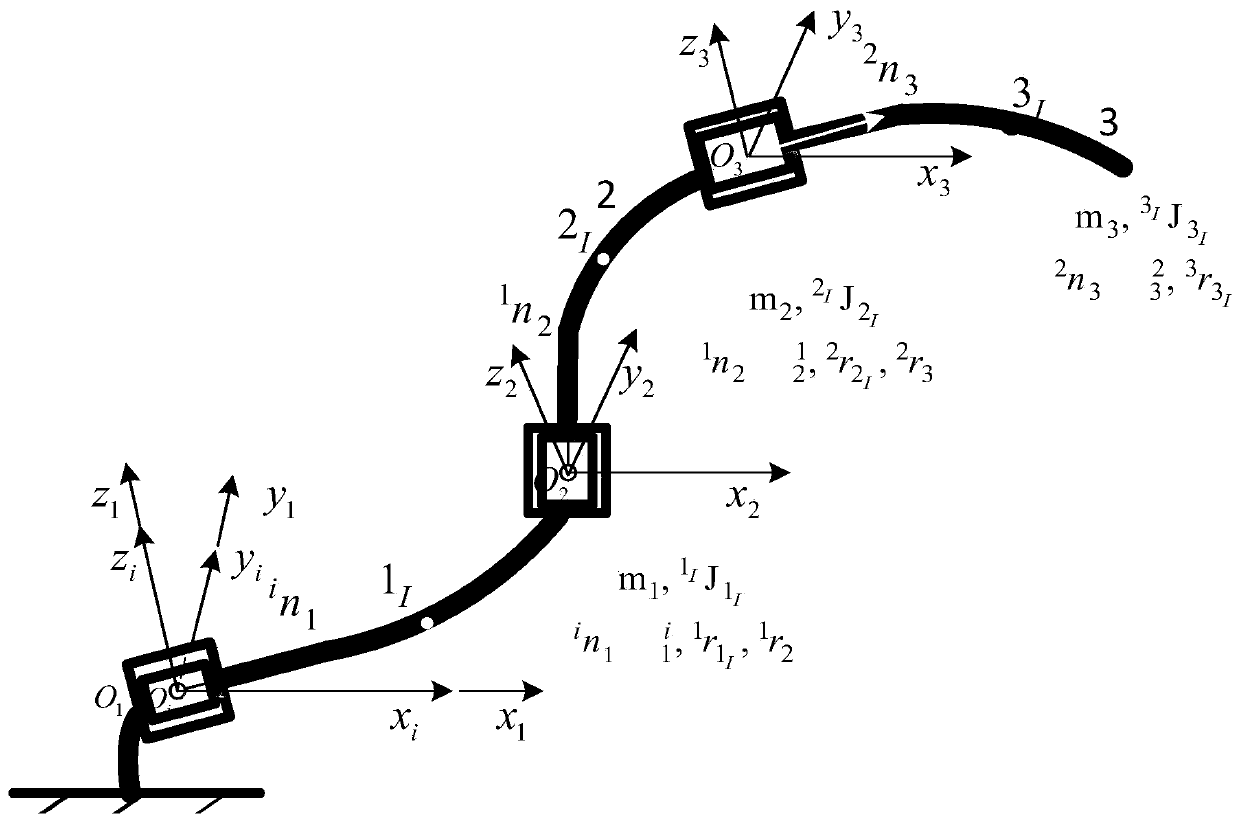
[0381] given as image 3 The shown universal 3R manipulator, A=(i,1:3]; apply the method of the present invention to establish the tree chain Ju-Kane dynamic equation, and obtain the generalized inertia matrix.
[0382] Step 1 establishes an iterative equation of motion based on axis invariants.
[0383] The rotation transformation matrix based on the axis invariant by formula (46)
[0384]
[0385] have to
[0386]
[0387] Kinematic iteration:
[0388]
[0389]
[0390]
[0391]
[0392]
[0393] Second-order tensor projection formula:
[0394]
[0395]
[0396] From formula (48) and formula (47) get
[0397]
[0398] From formula (49), formula (47) and formula (55)
[0399]
[0400] From formula (50) and formula (55) get
[0401]
[0402] From formula (51), formula (55) and formula (57) get
[0403]
[0404] From formula (52) and formula (55) we get
[0405]
[0406] From formula (53) and formula (55) get
[0407]
[040...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com