Unmanned aerial vehicle control method and device
A control method and unmanned aerial vehicle technology, applied in the direction of attitude control, non-electric variable control, control/adjustment system, etc., can solve the problem of low efficiency of unmanned aerial vehicle scene shooting, achieve improved use efficiency, simple operation, and easy implementation Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
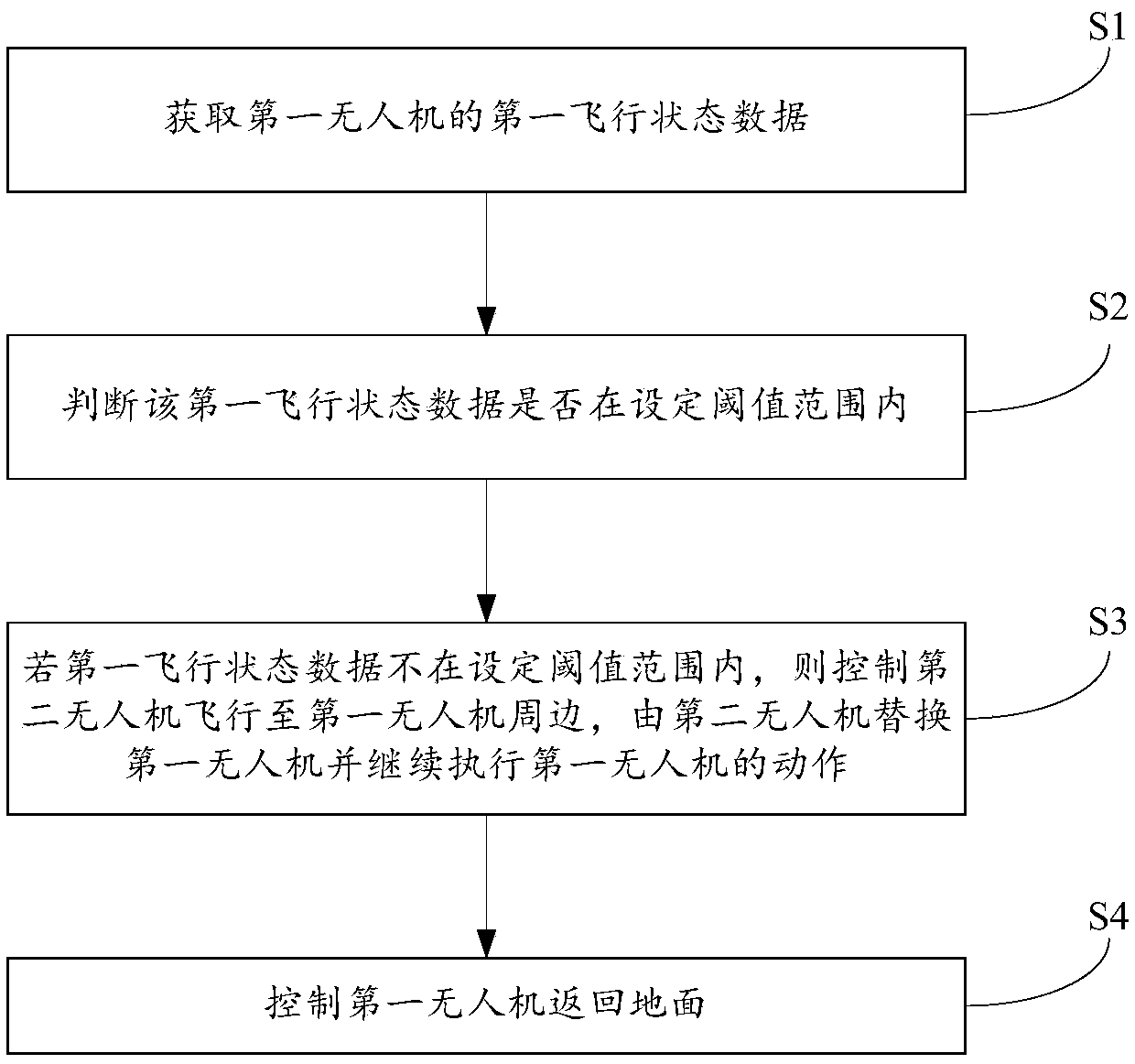
[0032] An embodiment of the present invention provides a method for controlling a drone, such as figure 1 A flow chart of a method for controlling an unmanned aerial vehicle shown, the method may include the following steps:
[0033] S1, acquiring the first flight state data of the first drone;
[0034] During specific implementation, the first flight state data may be acquired by a sensor on the first UAV, and the first flight state data at least includes flight speed, flight altitude, flight coordinates, remaining battery power, and the like.
[0035] S2, judging whether the first flight state data is within a set threshold range;
[0036] S3, if the first flight state data is not within the set threshold range, then control the second drone to fly to the surroundings of the first drone, replace the first drone with the second drone and continue to execute the first unmanned aerial vehicle. machine action;
[0037]Specifically, for the above-mentioned first flight state d...
Embodiment 2
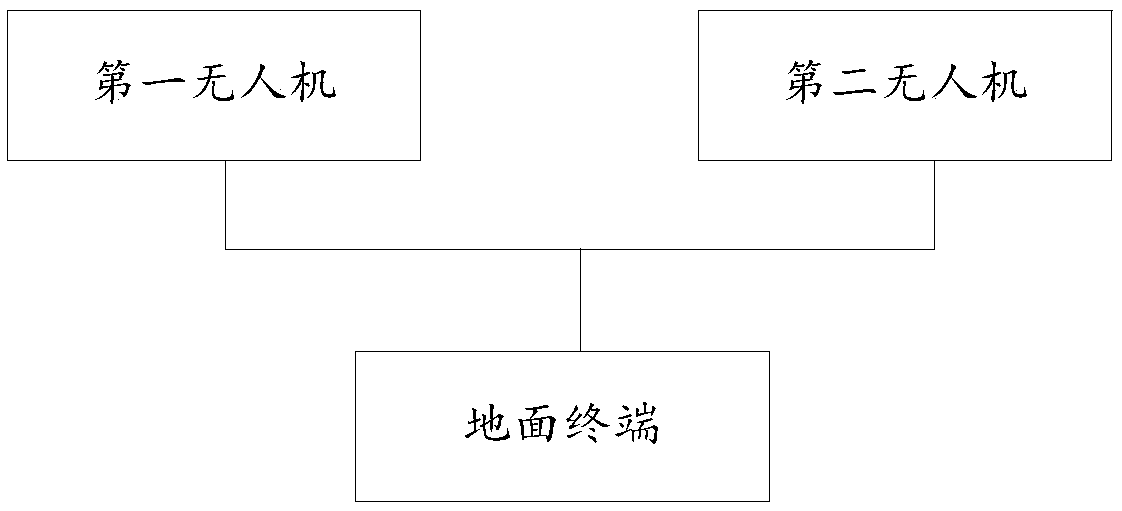
[0070] Corresponding to the UAV control method provided in the above embodiments, the embodiment of the present invention also provides a UAV control device, such as Figure 4 A structural schematic diagram of a UAV control device shown, the device includes the following structure:
[0071] The first obtaining module 40 is used to obtain the first flight state data of the first unmanned aerial vehicle;
[0072] A judging module 42, configured to judge whether the first flight state data is within a set threshold range;
[0073] The control module 44 is used to control the second unmanned aerial vehicle to fly around the first unmanned aerial vehicle if the first flight state data is not within the set threshold range, replace the first unmanned aerial vehicle by the second unmanned aerial vehicle and continue to execute The action of the first drone;
[0074] The return module 46 is used to control the first UAV to return to the ground.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com