Target recognition method and device based on three-dimensional point cloud and storage medium
A 3D point cloud, target recognition technology, applied in 3D object recognition, character and pattern recognition, image data processing and other directions, can solve problems such as no good solutions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
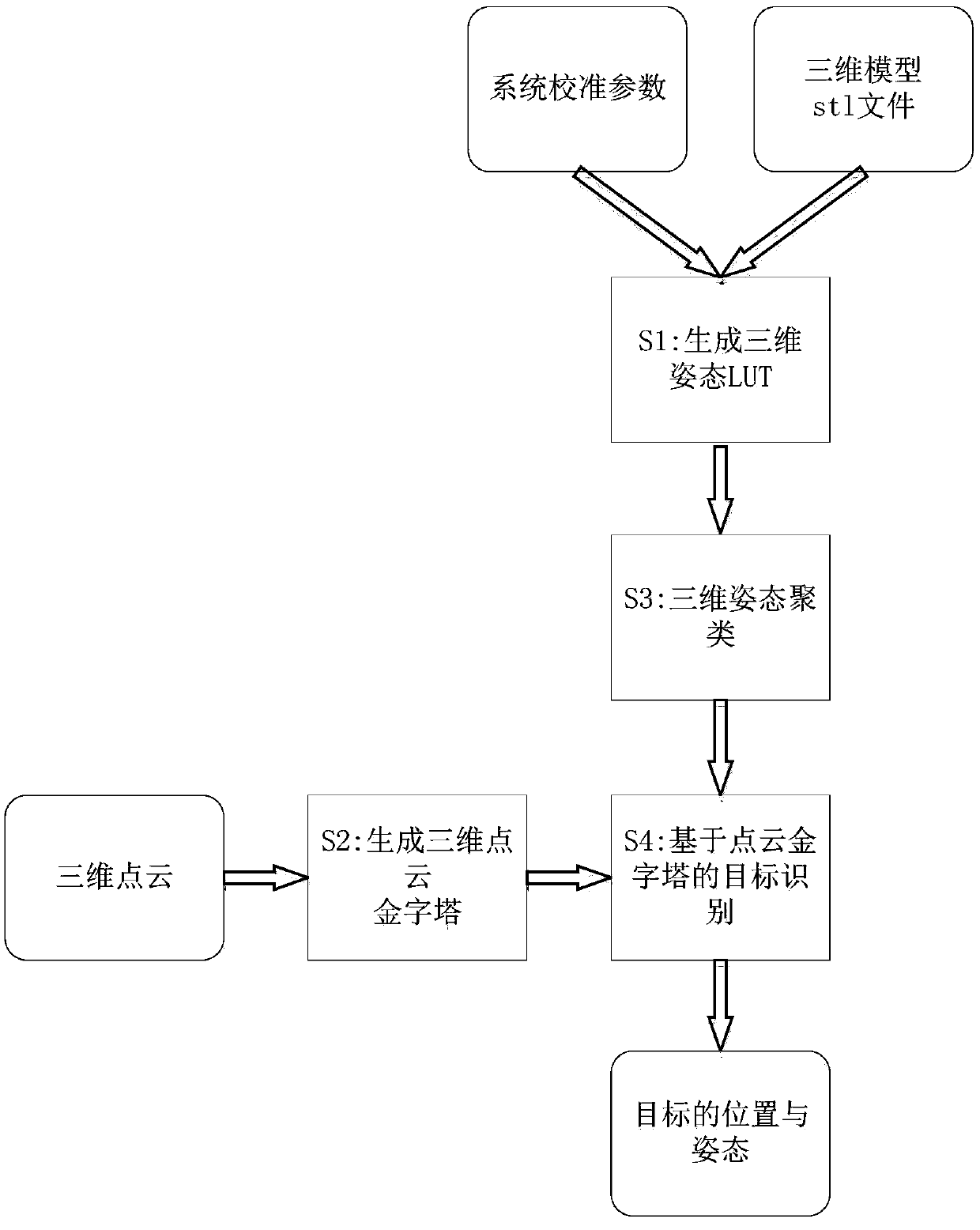
[0088] A method for target recognition based on a three-dimensional point cloud provided by the present invention specifically includes the following steps:
[0089] S1: Generate the 3D pose LUT of the model (Look Up Table displays the lookup table)
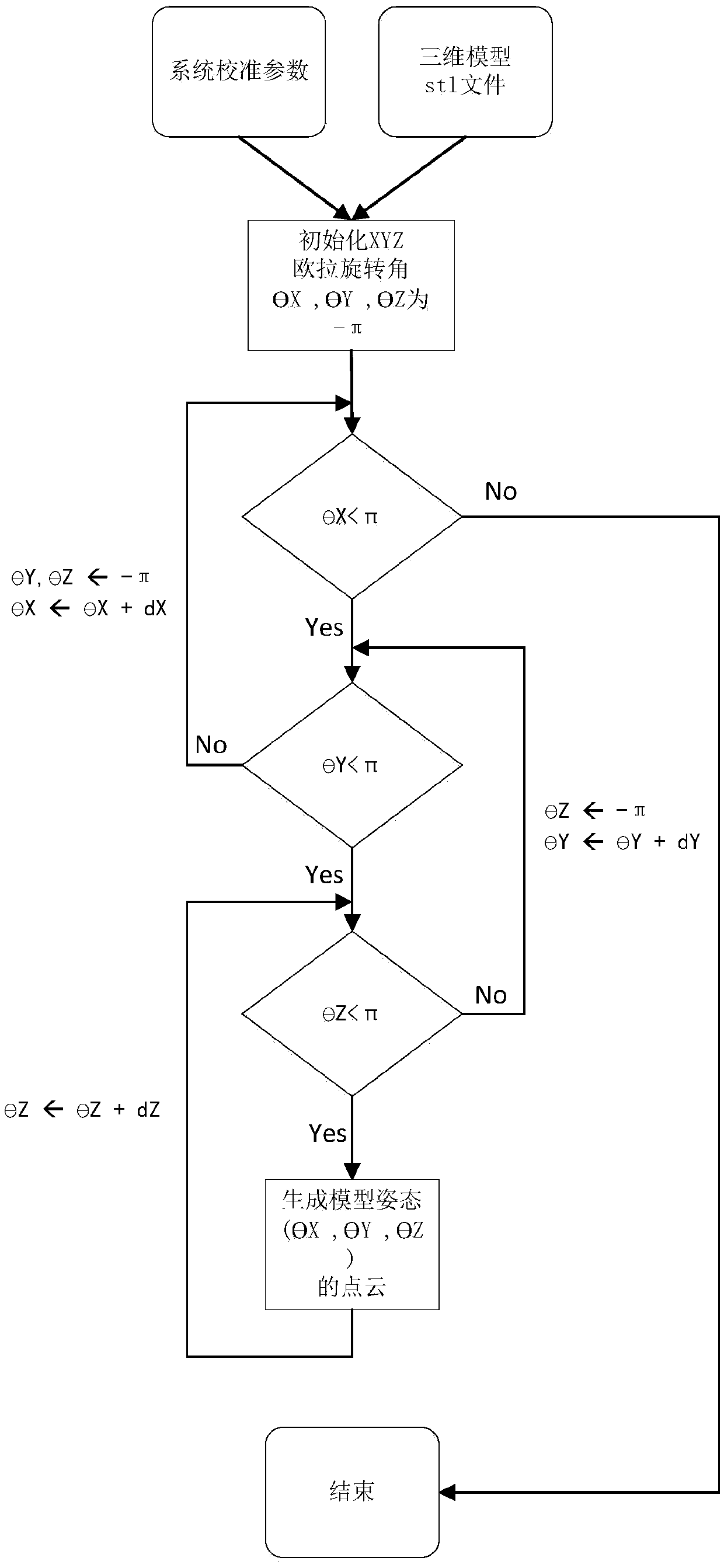
[0090] S11 Align the model coordinate system to the camera 1 coordinate system (including the origin and attitude are also aligned separately), use the Euler XYZ rotation angles θX, θY, θZ, and follow the model in sequence dX=π / 180, dY=π / 180 , dZ=π / 180 step size to rotate, and the range of rotation angles in the x, y, and z directions is (-π, π).
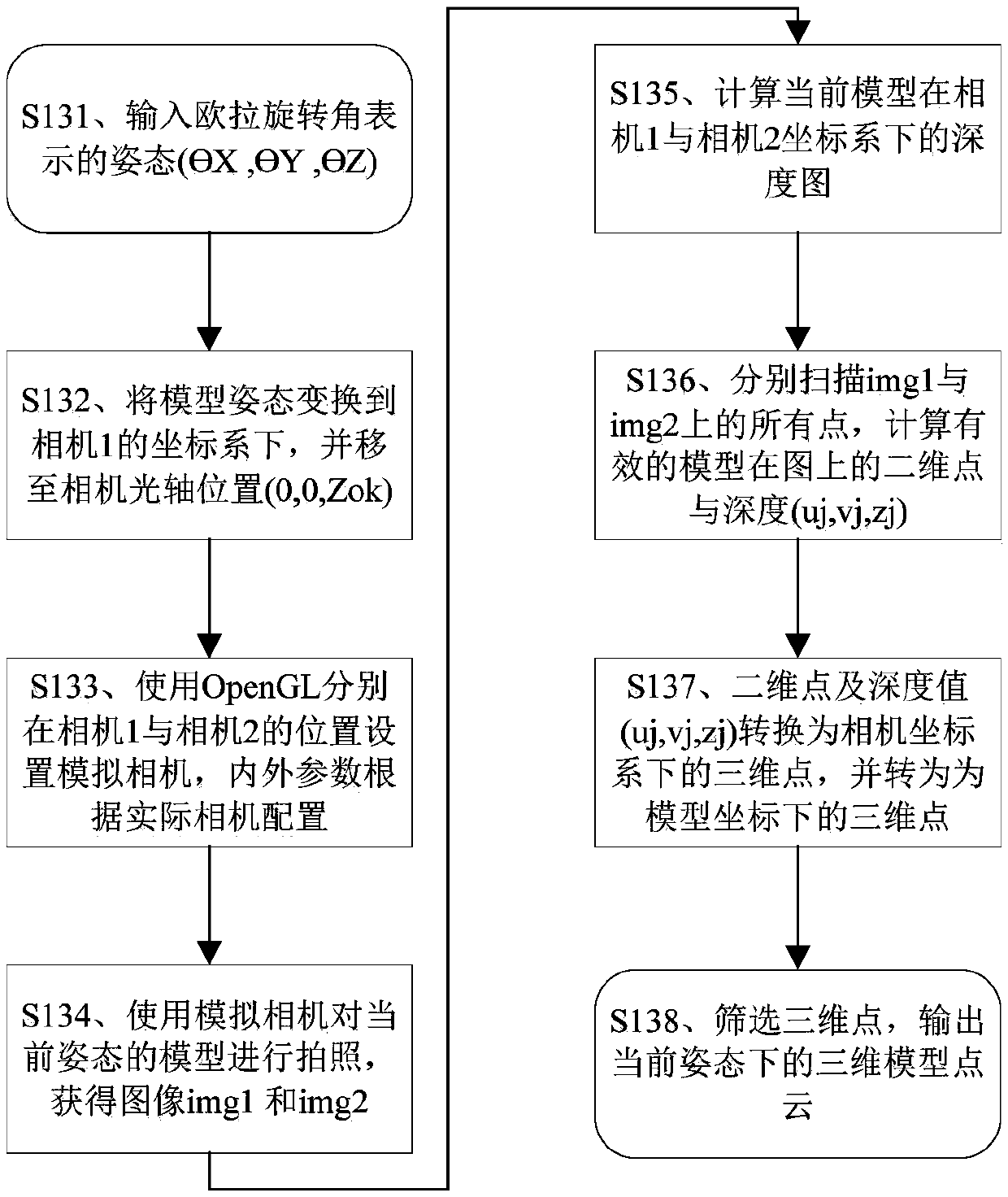
[0091] S12 sets the current posture index as (i, j, k), then the current posture is expressed as θX=-π+i*dX, θY=-π+j*dY, θZ=-π+k*dZ, and generates the current The model point cloud under the attitude is stored in the lookup table indexed by (i,j,k), the steps are as follows figure 2 shown, including:
[0092] Judge the size relationship between θX and π; when θX<π is YES, enter the...
Embodiment 2
[0155] The embodiment of the present invention also provides a target recognition device based on 3D point cloud, please refer to Figure 6 , the device includes the following modules:
[0156] A model point cloud LUT generation module 10 , a three-dimensional scene pyramid generation module 20 , a model point cloud clustering module 30 and a point cloud pyramid object recognition module 40 .
[0157] The model point cloud LUT generation module 10 is used to generate the three-dimensional posture LUT of the model;
[0158] The model point cloud LUT generation module 10 includes a rotation unit 101 , a model point cloud generation unit 102 and a model point cloud storage unit 103 .
[0159] The rotation unit 101 is used to align the model coordinate system to the camera 1 coordinate system, using the Euler XYZ rotation angles θX, θY, θZ, and sequentially aligning the model according to dX=π / 180, dY=π / 180, dZ= Rotate with a step size of π / 180; where, the rotation angle ranges ...
Embodiment 3
[0185] According to an embodiment of the present invention, a computer-readable storage medium is provided, on which a computer program is stored, and when the program is executed by a processor, the steps in the above-mentioned point cloud-based three-dimensional object recognition method are implemented, and the specific steps are as follows: It is described in Example 1 and will not be repeated here.
[0186] The memory in this embodiment can be used to store software programs and various data. The memory may mainly include a program storage area and a data storage area, wherein the program storage area may store an operating system, an application program required by at least one function, etc.; the data storage area may store data created according to the use of the mobile phone, etc. In addition, the memory may include high-speed random access memory, and may also include non-volatile memory, such as at least one magnetic disk storage device, flash memory device, or othe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com