Underactuated multi-unmanned ship formation tracking method based on master-slave distributed model predictive control
A model predictive control and unmanned ship technology, applied in the direction of adaptive control, general control system, non-electric variable control, etc., can solve the problem of centralized control with huge amount of calculation, limited detection range, central CPU cannot meet real-time requirements, etc. problem, to achieve the effect of reducing the amount of calculation and solving the thrust constraint
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
specific Embodiment approach
[0053] The present invention is described in detail below in conjunction with accompanying drawing, here take three unmanned ship formations as an example, and the specific implementation is as follows:
[0054] Step 1. Discretize it according to the unmanned ship mathematical model:
[0055]
[0056] m=30.5; g=9.81; I zz = 3.45; x u =-7.8; Y v =-262; N r =-188;
[0057] According to the mathematical model of unmanned ship tracking error, it is discretized:
[0058]
[0059] Step 2. Establish the main unmanned ship performance index:
[0060]
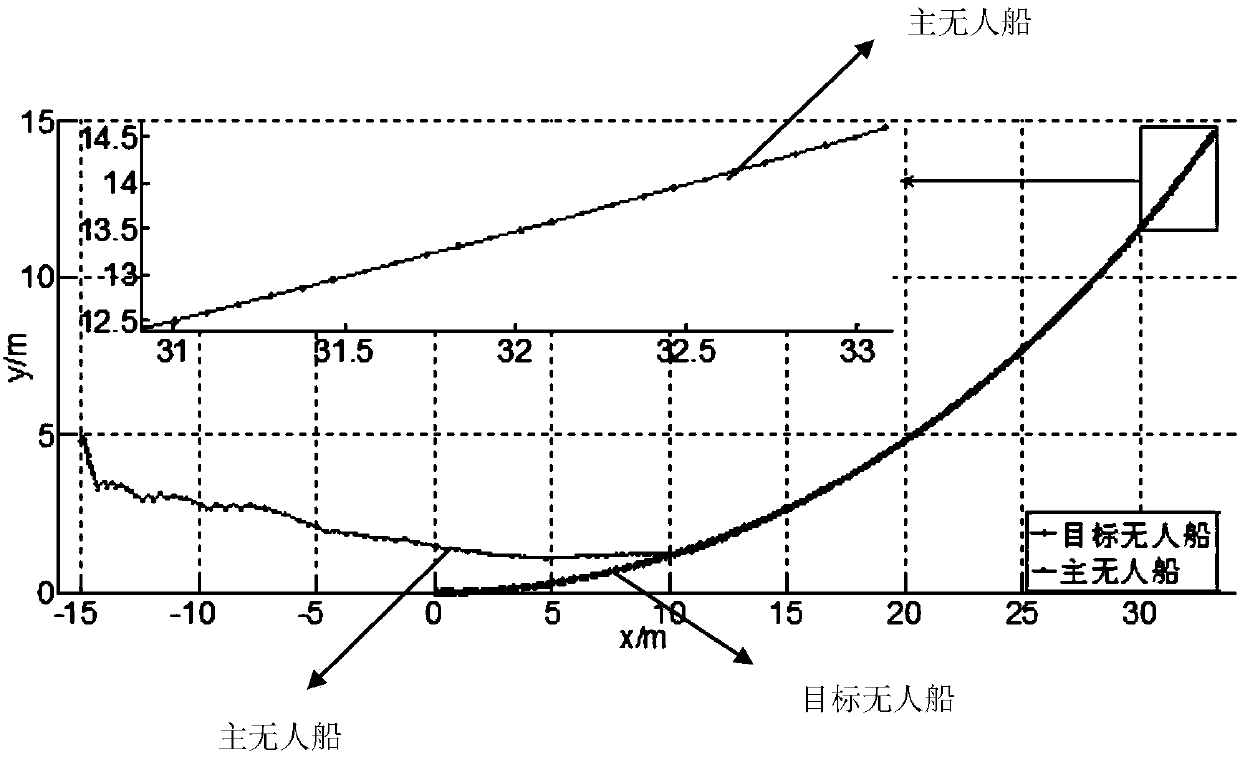
[0061] Q=diag([100,110,100,1,1,1]); P=diag([100,110,100,1,1,1]); R=diag([0.01,0.01]); N=40; initial value x 1 (0)=[-15,5,0,0,0,0] T ,x d (0)=[0,0,0,1,0,0] T Target input u d (k+m|k)=[10,5] T . The control variables satisfy the constraints: Solving the optimization problem P 1 , to get the optimal input at time k Apply its first input to the main drone.
[0062] Step 3. Establish performance indicators from...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com