Path planning device and method based on high-precision map
A path planning, high-precision technology, applied in the direction of measuring devices, road network navigators, instruments, etc., can solve the problems that are not suitable for automatic driving reference and cannot be divided into multiple lanes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0048] This embodiment provides a path planning method based on a high-precision map.
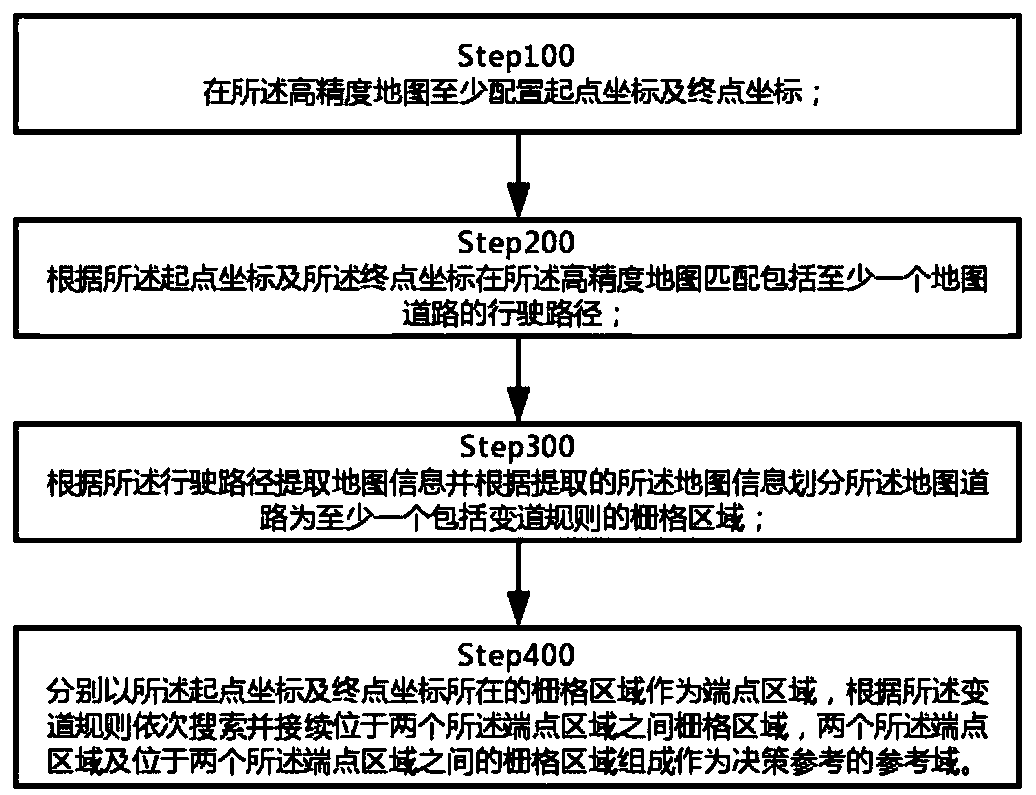
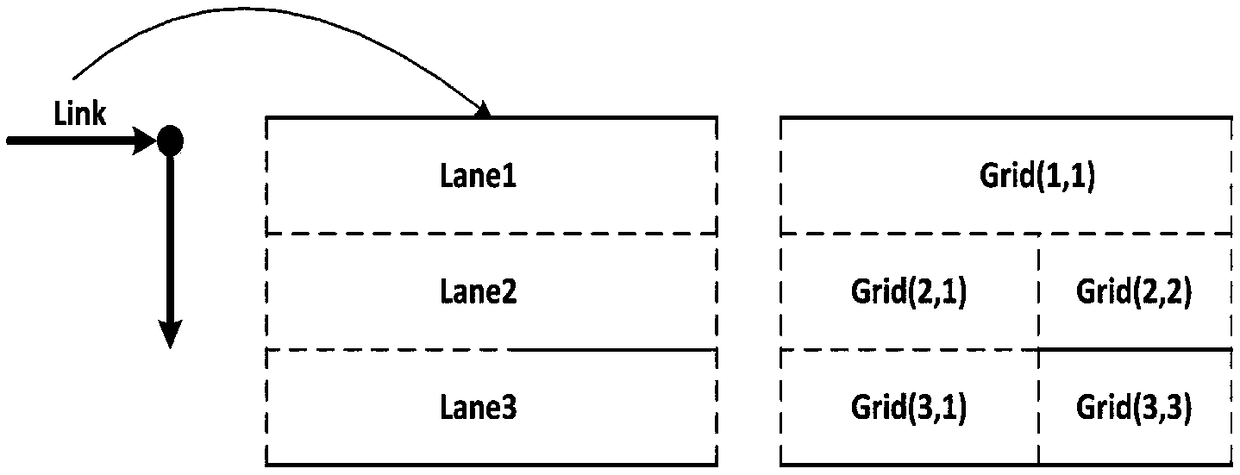
[0049] Through the method of this embodiment, the road data based on the high-precision map can be divided into at least one Grid, and the Grid between the starting point and the ending point of the path can be used as a decision-making reference for the decision-making layer; in order to achieve the aforementioned content, please refer to figure 1 .
[0050] Step100, mark the starting point coordinates and the ending point coordinates on the high-precision map according to the driving route;
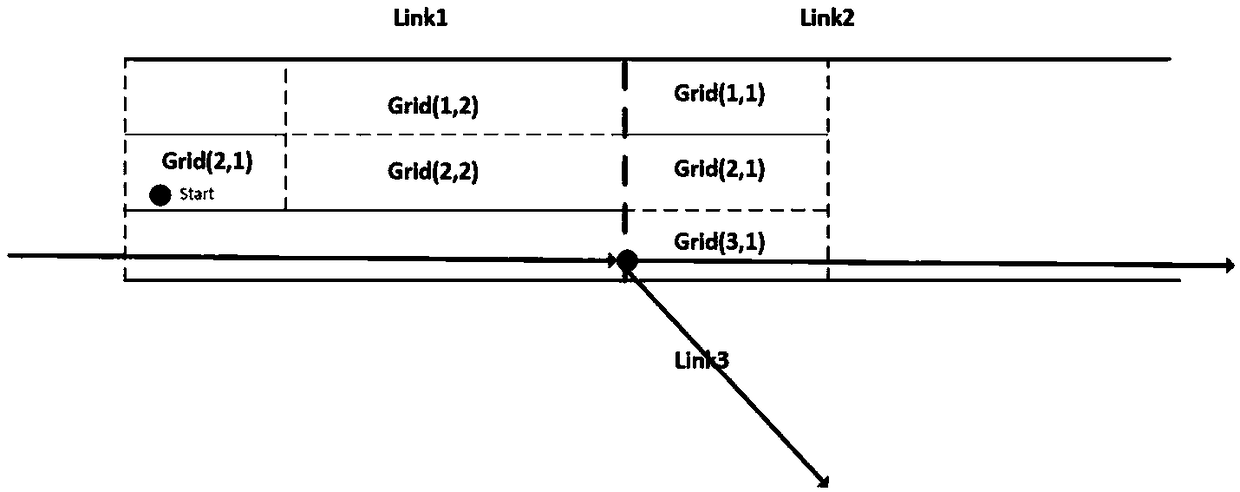
[0051] Step 200. Match the driving path on the high-precision map according to the starting point coordinates and the ending point coordinates. The driving path can be a Link or a combination of at least two Links; details are as follows.
[0052] Step210, the coordinates of the starting point and the ending point are all located in the same Link; then directly use the Link as the driving path;
[...
Embodiment 2
[0074] It is considered that at least two or more reference domains may be obtained through searching. Compared with the first embodiment, the difference of this embodiment is Step400, specifically:
[0075] Step410, respectively take the Grid where the starting point coordinates and the ending point coordinates are located as the end point area, search and connect the Grid between the two end point areas in sequence according to the lane change rules, the two end point areas and the Grid between the two end point areas form at least two a reference domain;
[0076] Step420, extracting path information of all driving domains according to the high-precision map;
[0077] Step430. Select a reference domain as a decision-making reference according to the path information of the comparison driving domain.
[0078] Please refer to Figure 5 , the present embodiment provides a path planning device based on a high-precision map, including a map module, which establishes a high-pre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com