


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
A Parameter Estimation Method for FM CW Radar Target Based on Data Point Merging
A technology of frequency modulation continuous wave and parameter estimation, which is applied in radio wave measurement systems, instruments, etc., and can solve the problems of inaccurate determination of the number of targets and large parameter estimation errors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
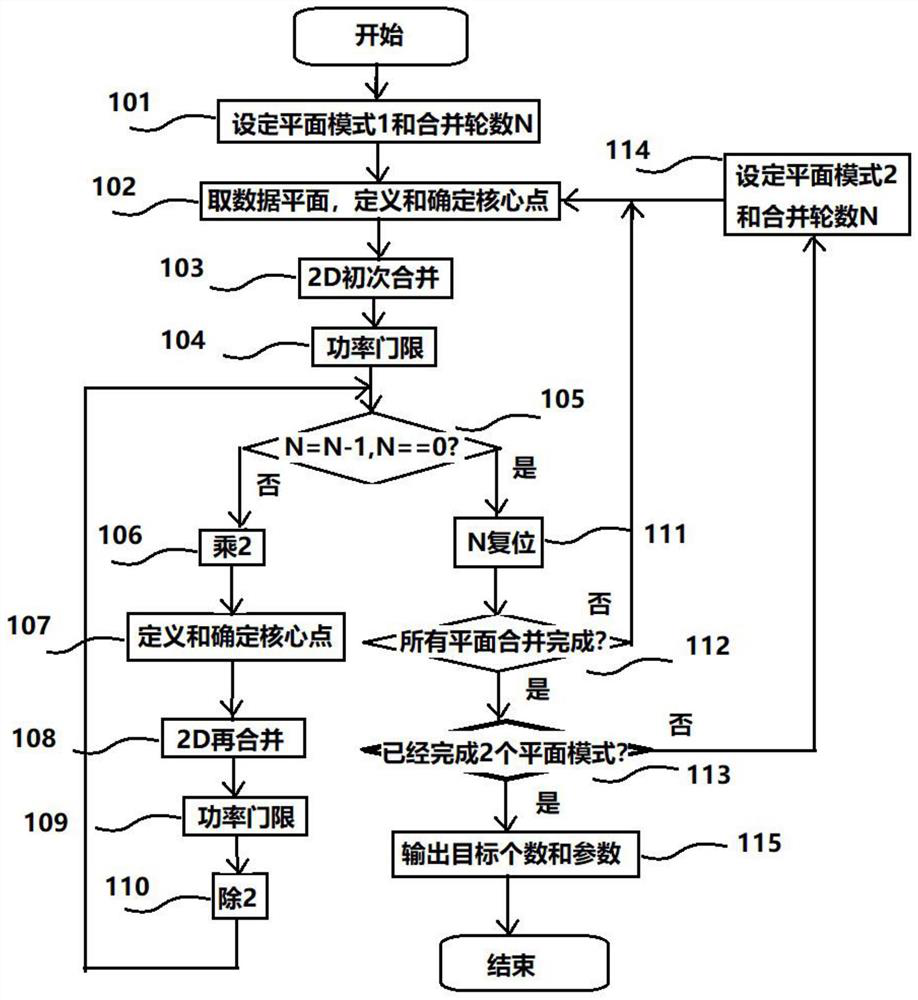
[0067] refer to Figure 1-7 , the embodiment of the present invention provides a target parameter estimation method based on data point merging provided by the present invention. Such as image 3 As shown, the method consists of a combination of two planar modes.
[0068] Step 101, determine plane mode 1, and merge will be performed on all planes thus divided. In the description of the following merging methods, only the x-y plane mode is taken as an example. Set the number of merge rounds N.
[0069] Step 102, take a two-dimensional data plane in the determined plane mode, define the requirements of core points, and determine which data points are core points.
[0070] Step 103, the two-dimensional data is combined for the first time. Merge the adjacent core points to get the target point. Definition: If the core point P1 with the value of (kx1, ky1) and the core point P2 with the value of (kx2, ky2) satisfy:
[0071] |kx1 – kx2|<=1 and |ky1 – ky2|<=1
[0072] Then P1...
Embodiment 2
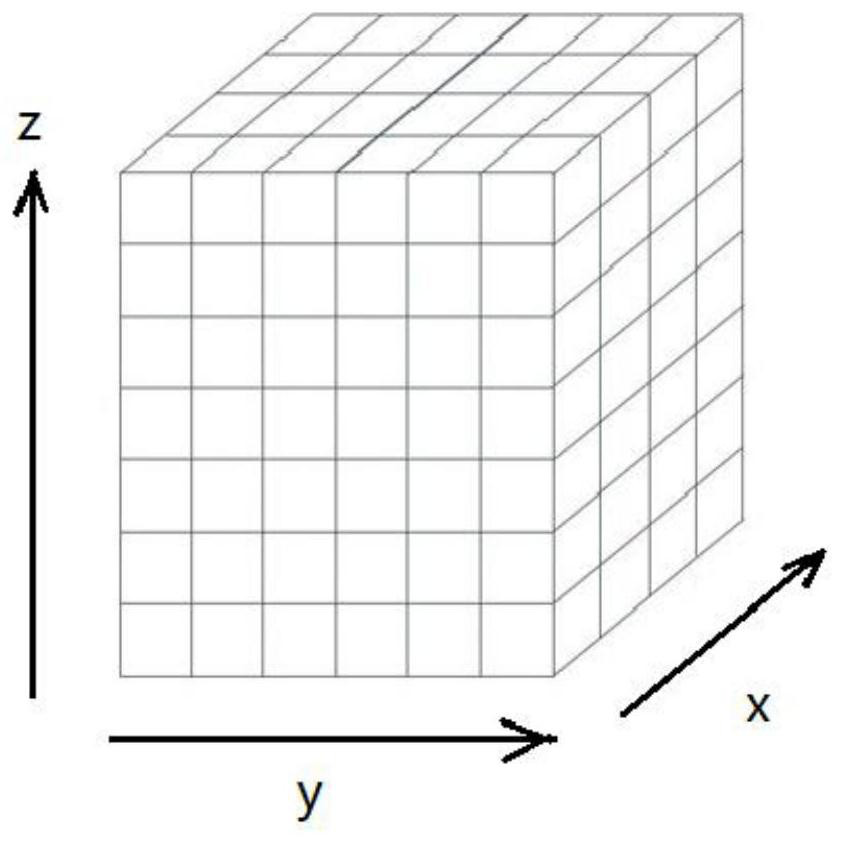
[0105] The second implementation method provided by the present invention is to directly perform three-dimensional merging processing on the data cube raster data. Figure 8 A schematic flow chart of the method. Its processing method, including the merging criterion, is directly extended from the aforementioned two-dimensional merging method. At this time, the data points and the core points participating in the merger are three-dimensional (kx, ky, kz) data. Therefore, the expansion / compression process of step 206 / step 210 is for kx, ky and kz.
[0106] Step 203, three-dimensional initial merging. Merge the adjacent core points to get the target point. Definition: If the core point P1 whose value is (kx1, ky1, kz1) and the core point P2 whose value is (kx2, ky2, kz2) satisfy:
[0107] |kx1 – kx2|<=1 and |ky1 – ky2|<=1 and |kz1 – kz2|<=1
[0108] Then P1 and P2 are the initial merged adjacent core points. The three-dimensional initial merger criteria are as follows:
[...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com