Unmanned aerial vehicle route planning method based on improved Salp algorithm
A track planning, UAV technology, applied in three-dimensional position/channel control, instrument, non-electric variable control and other directions, can solve problems such as incompatibility, falling into local optimum, etc., to achieve flexible calculation process and slow convergence speed Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
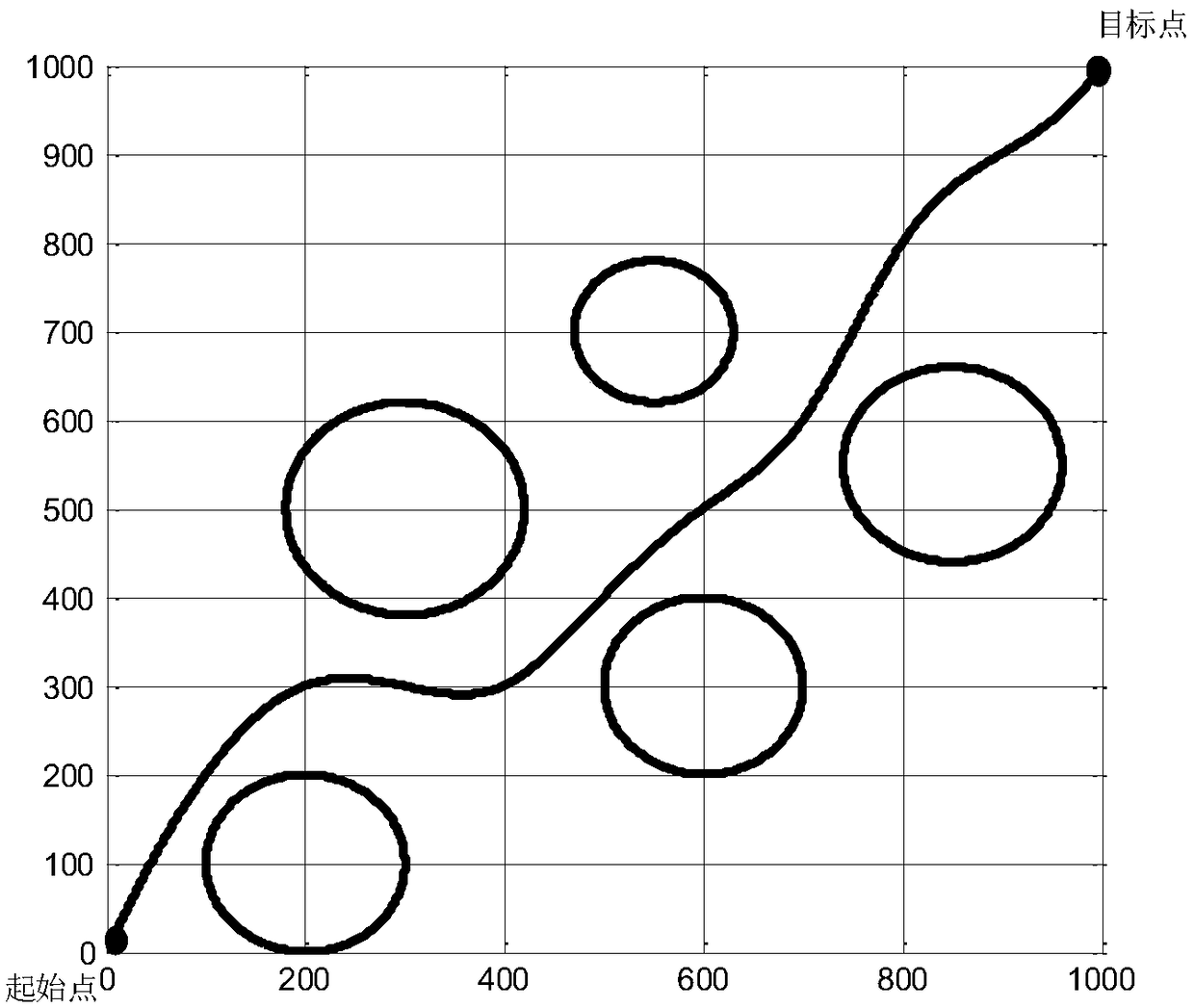
[0104] Carry out a simulation experiment, select a simulation space of 1000*1000; set 5 threats, the coordinates are (200,100), (300,500), (300,300), (550,700), (850,550), and the threat radius is 100,120,100,80,110 ;The coordinates of the starting point are (0,0), and the coordinates of the ending point are (1000,1000); the initial salp population is 300, the maximum number of iterations is 100, the adjustable control factor n is set to 1, and h is set to 1 , ε 1 set to 5, ε 2 Set to 40. Obtained by Matlab such as image 3 The track shown and the Figure 4 As shown in the convergence curve of the optimization process, the time for planning to obtain the optimal track is 3.7596241s.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com