Driver modeling method for horizontal/longitudinal motion unified framework
A driver model, longitudinal motion technology, applied in control/regulation systems, motor vehicles, transportation and packaging, etc., can solve problems such as control effect error, and achieve good theoretical guiding significance and application prospects.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] The proposed design scheme will be further elaborated and illustrated below in conjunction with the accompanying drawings.
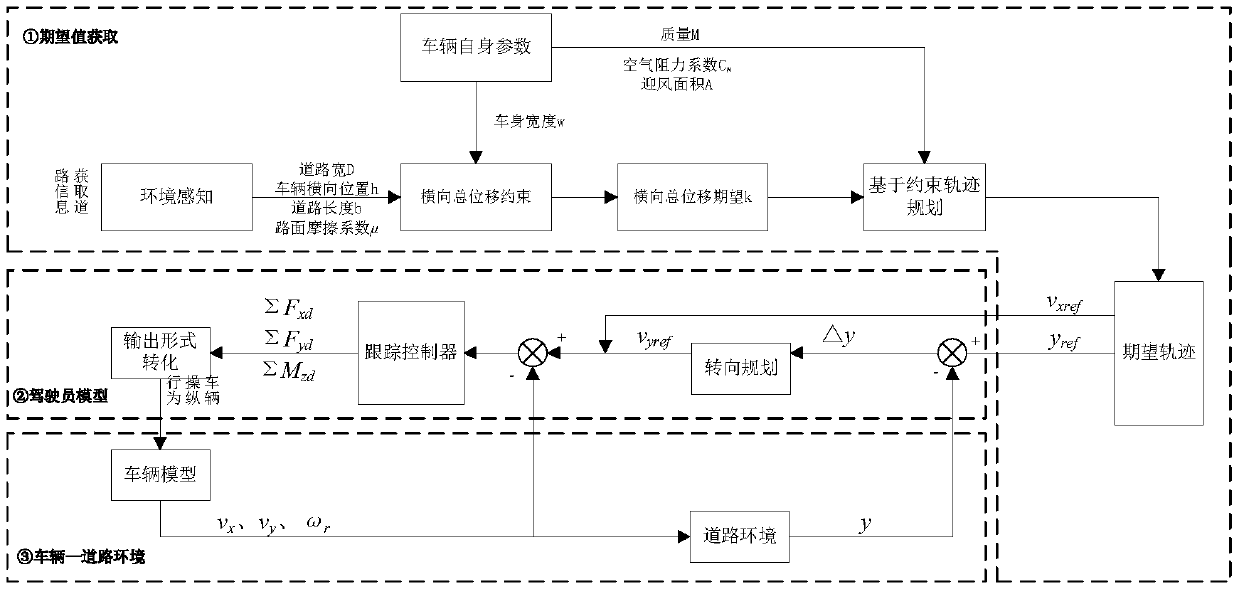
[0060] The present invention proposes a driver model design method in which vehicle lane change trajectory planning and lateral / longitudinal motion are unified for vehicle driving safety, wherein the driver model workflow layer diagram involved is as follows Figure 1 shown.
[0061] Module ① represents the horizontal and vertical expected quantity acquisition module of the driver model. Through the perception of the external environment and the parameters of the vehicle itself, the lateral displacement parameters and the constraint domains of the flatness parameters after the trajectory analysis of the vehicle when the vehicle performs lateral lane change are obtained, and then through the environment and The driving safety requirements and the driver's own characteristics optimize the trajectory parameters to obtain the optimized parameters, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com