Neutral buoyancy robot attitude and trajectory control method based on distributed model predictive control
A technology of model predictive control and trajectory control, applied in attitude control, two-dimensional position/course control, etc., can solve problems such as insufficient coupling and anti-disturbance, and reduce the amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0064] The present invention will be further described in detail below in conjunction with specific embodiments, which are explanations of the present invention rather than limitations.
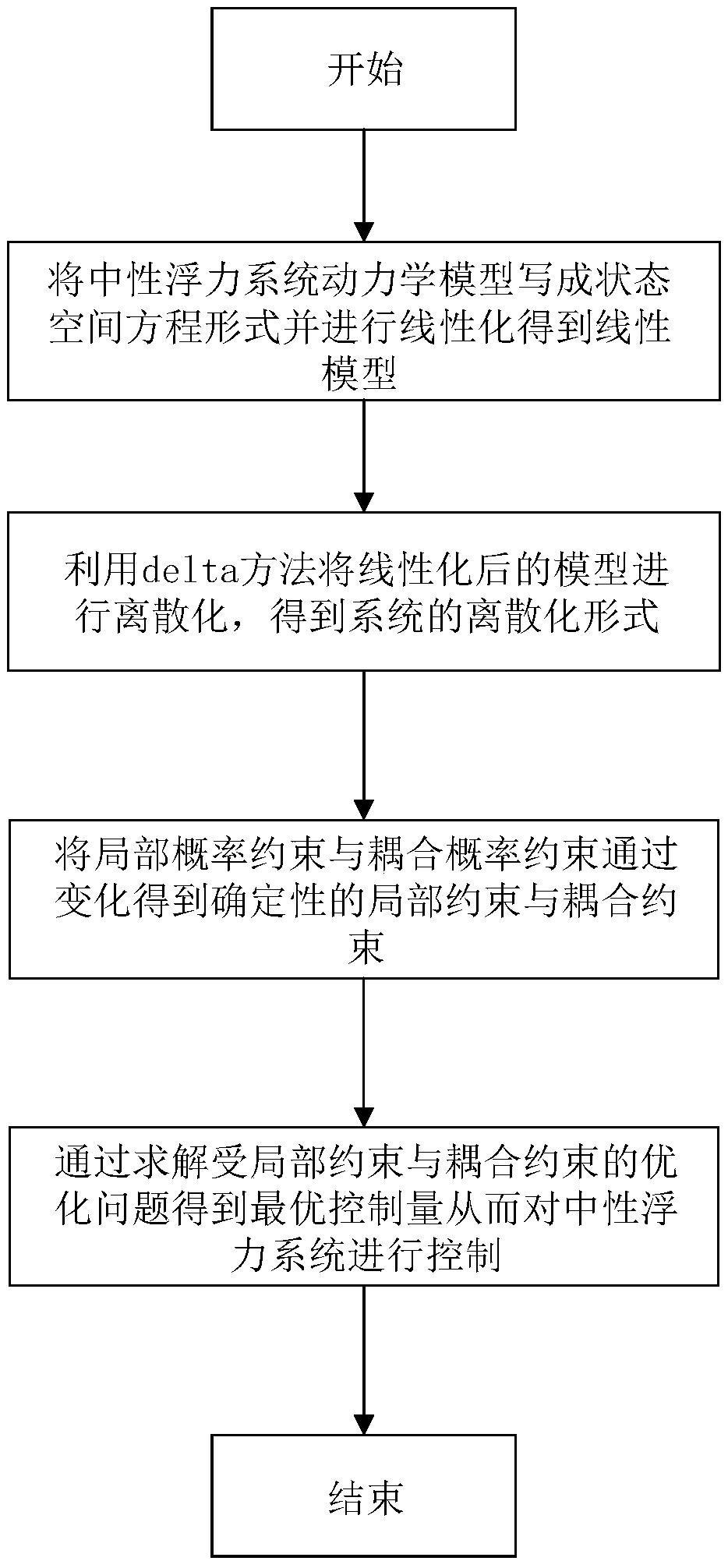
[0065] see figure 1 , the neutral buoyancy robot posture and trajectory control method based on distributed model predictive control disclosed by the present invention is realized by the following steps:
[0066] (a):
[0067] The dynamic model of the neutral buoyancy robot in the body coordinate system considering the formula (1)
[0068]
[0069] Among them, M is the inertial mass matrix, C(v) is the Coriolis force matrix, D(v) is the viscous resistance of the robot in water, g(η) is the negative buoyancy coefficient, and τ is the system input. The considered neutrally buoyant robot is in the geographic coordinate system Ox n the y n z n and robot body coordinate system Ox b the y b z b The relationship is as follows
[0070]
[0071] in, Respectively refers to the robot in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com