Remote operation system position and speed synchronization control method for heterogeneous robots
An operating system and synchronous control technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of increasing the control complexity of heterogeneous remote operating systems, manual and lack of flexibility from robots, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
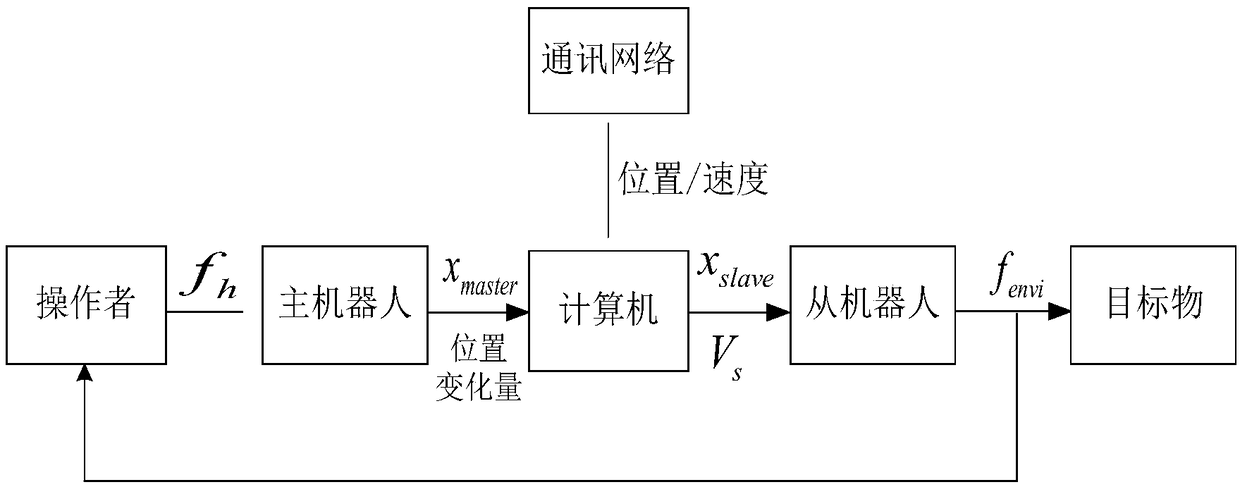
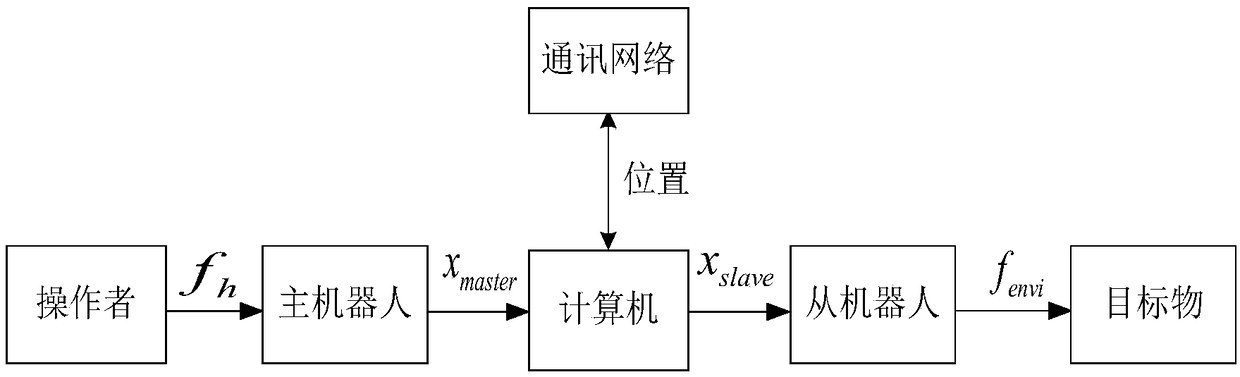
[0036] The heterogeneous robot remote operating system position and speed synchronization control method of the present invention, the operating principle is as follows figure 1 As shown, including operator, master robot, computer, communication network, slave robot and target. The force f that the operator acts on the main robot h , so that the main robot generates position information x master and position change amount, position information x master and the position change of the master robot is transmitted to the slave robot through the communication network; thereby controlling the position x of the slave robot in the three-dimensional task space slave , so that the position change of the master robot in the process controls the speed V of the slave robot in the three-dimensional task space s , so that the position and velocity of the slave robot are synchronized with those of the master robot. Make the slave robot act on the target more accurately, and make the slave...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com