Unpowered exoskeleton auxiliary robot
A robot and exoskeleton technology, applied in the field of unpowered exoskeleton-assisted robots, can solve the problems of high cost and heavy weight, and achieve the effect of low cost, light weight and load reduction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
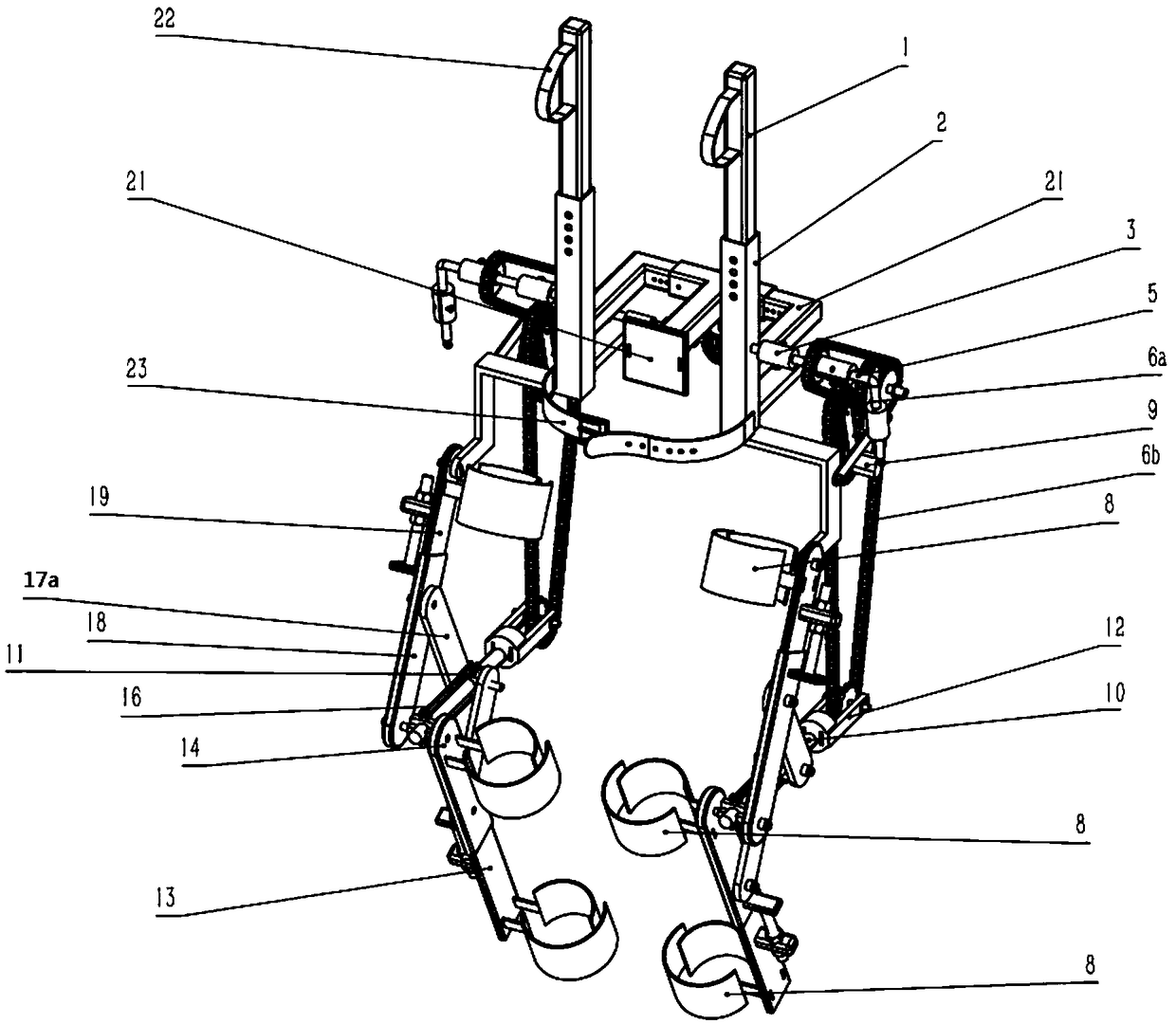
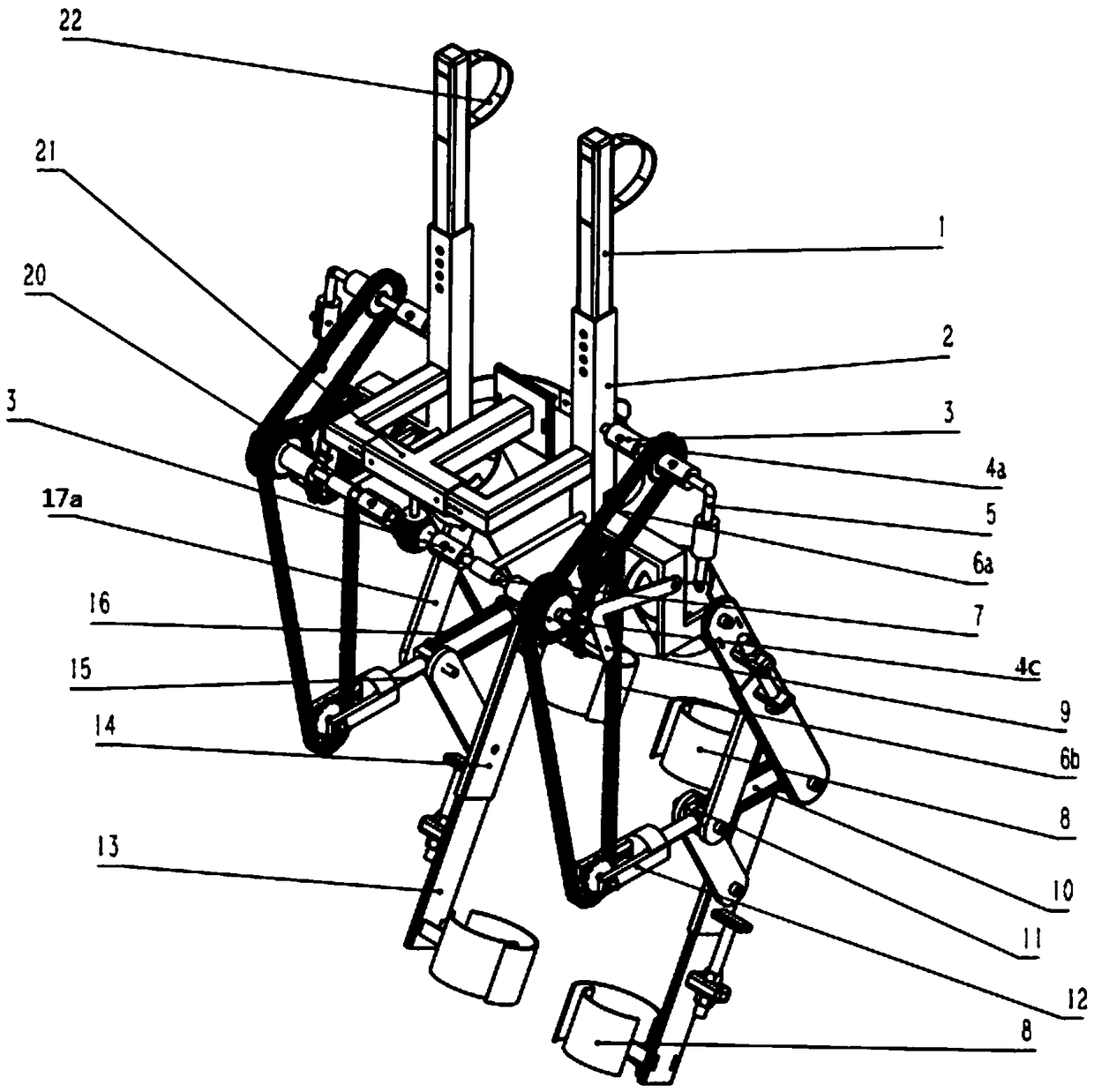
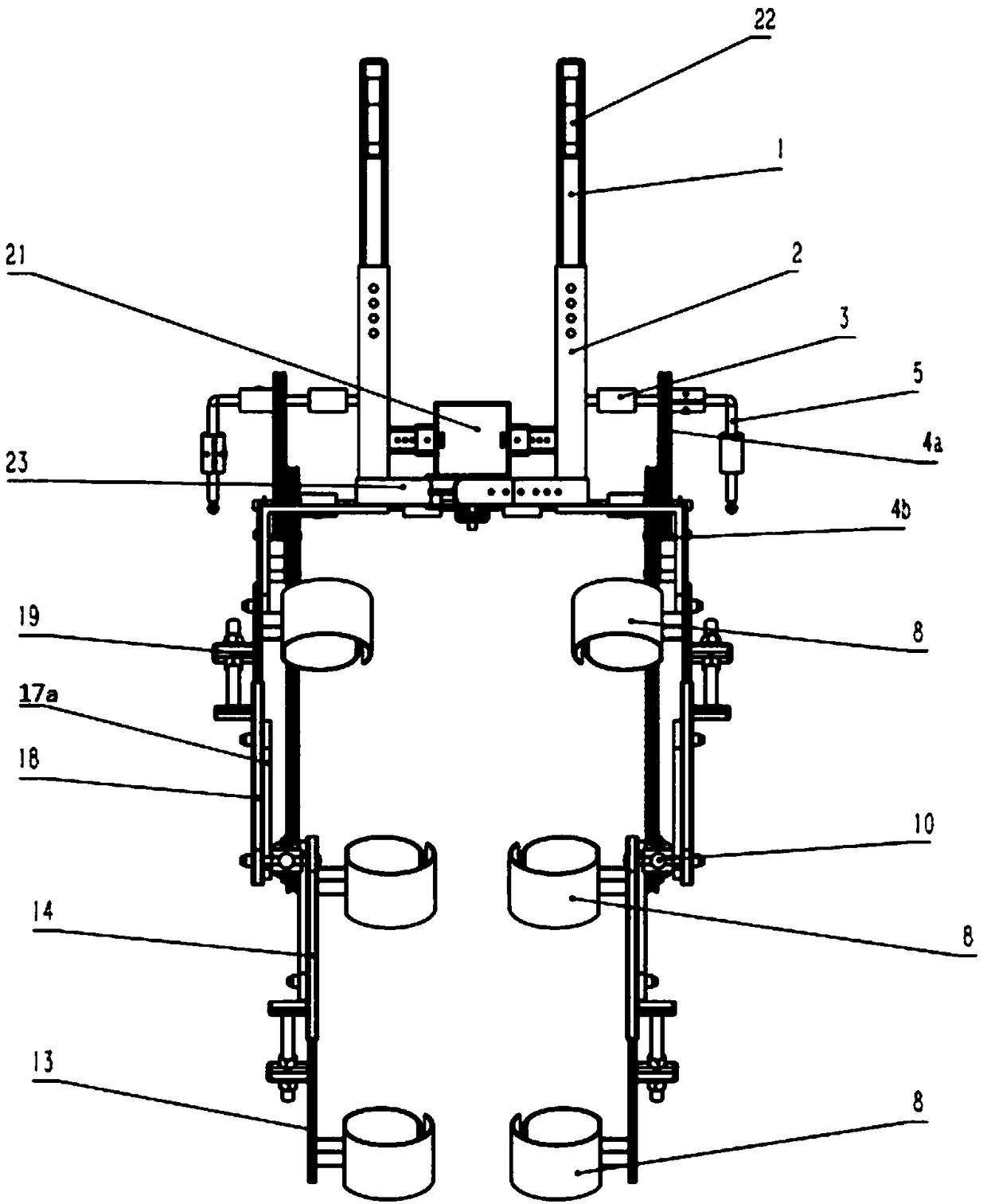
[0052] A kind of unpowered exoskeleton auxiliary robot, its structure see Figure 1-Figure 4 As shown, the robot includes:
[0053] Support mechanism: including the back support assembly which is connected sequentially from top to bottom, two sets of thigh support assemblies and two sets of calf support assemblies arranged symmetrically, and the first parallel power-assisted stabilizing plate whose ends are respectively hinged to the thigh support assembly and calf support assembly 17a and the second parallel power-assisted stabilizing plate 17b;
[0054] Drive mechanism: including drive components arranged symmetrically on the left and right, including the arm transmission rod 5, the sprocket connected to the arm transmission rod 5 through the transmission gear set and driven to rotate by it, the sprocket mounting seat 12, and the sprocket mounting seat 12 fixedly connected Slider guide rail shaft 10, and the moving slider 11 that is arranged on the slider guide rail shaft 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com