Device for positioning surgical operation tools and positioning method thereof
A technology of surgical tools and positioning devices, applied in the directions of surgery, stereotaxic surgical instruments, medical science, etc., can solve the problems of patients' economic burden, high computational complexity, huge mechanical system, etc., and achieves reduction of freedom requirements and computational difficulty The effect of reducing, reducing complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] In order to better explain the present invention and facilitate understanding, the present invention will be described in detail below through specific embodiments in conjunction with the accompanying drawings.
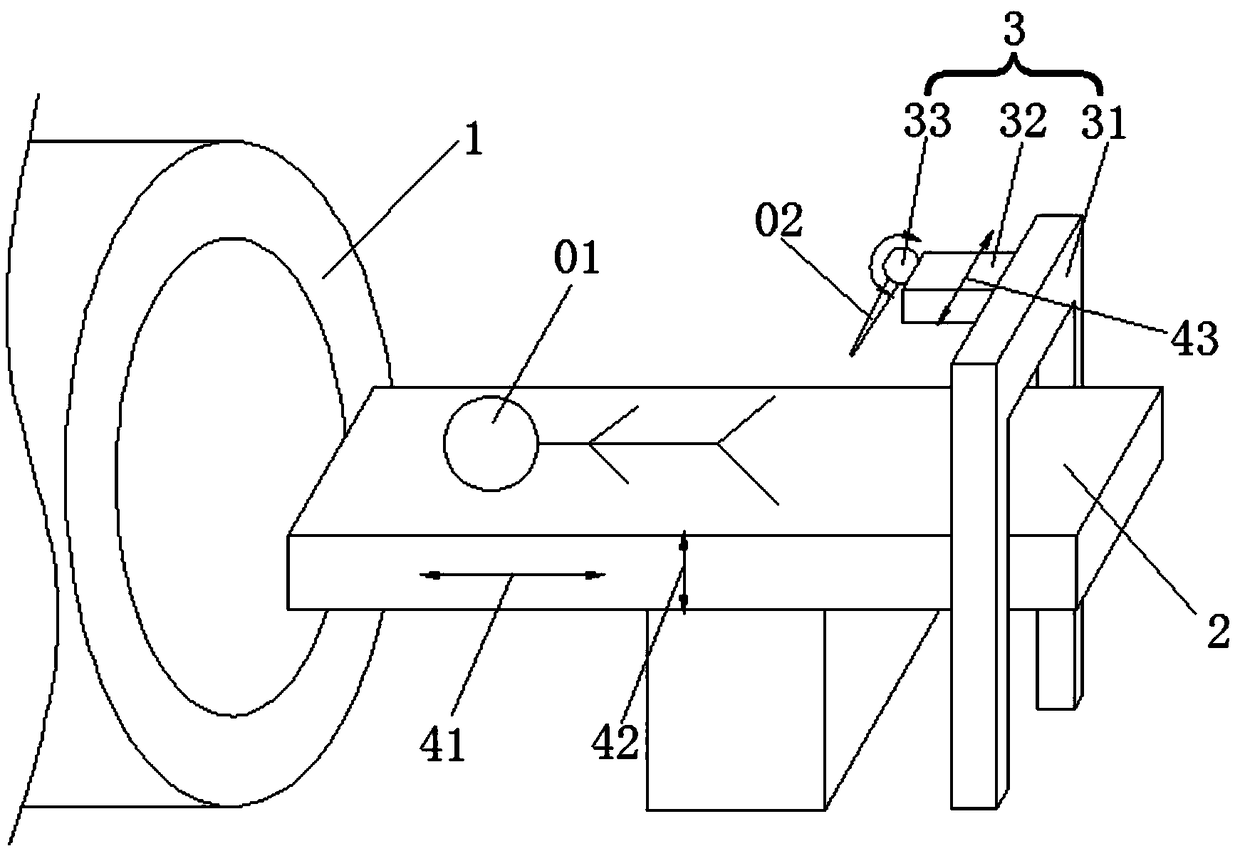
[0034] The present invention provides a surgical tool positioning device, such as figure 1 As shown, it includes a medical imaging device 1 for taking medical images of the patient 01; a support system 2 for supporting the patient 01 and driving the patient 01 to translate; a mechanical arm 3 for loading the surgical tool 02 and driving the surgical tool 02 Movement and adjustment of the posture of the surgical tool 02; a controller (not shown in the figure), which communicates with the medical imaging device 1, the support system 2 and the robotic arm 3, and controls the support system 2 and the robotic arm 3. When the surgical tool 02 needs to be positioned, the controller calculates the positioning data of the surgical tool 02 relative to the patient 01 acco...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com