Visual positioning obstacle avoidance system and method for unmanned aerial vehicle
A visual positioning and binocular vision system technology, applied in the field of visual positioning and obstacle avoidance systems, can solve problems such as blurred and difficult graphics, and achieve the effects of fast processing speed, low power consumption, and small size
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
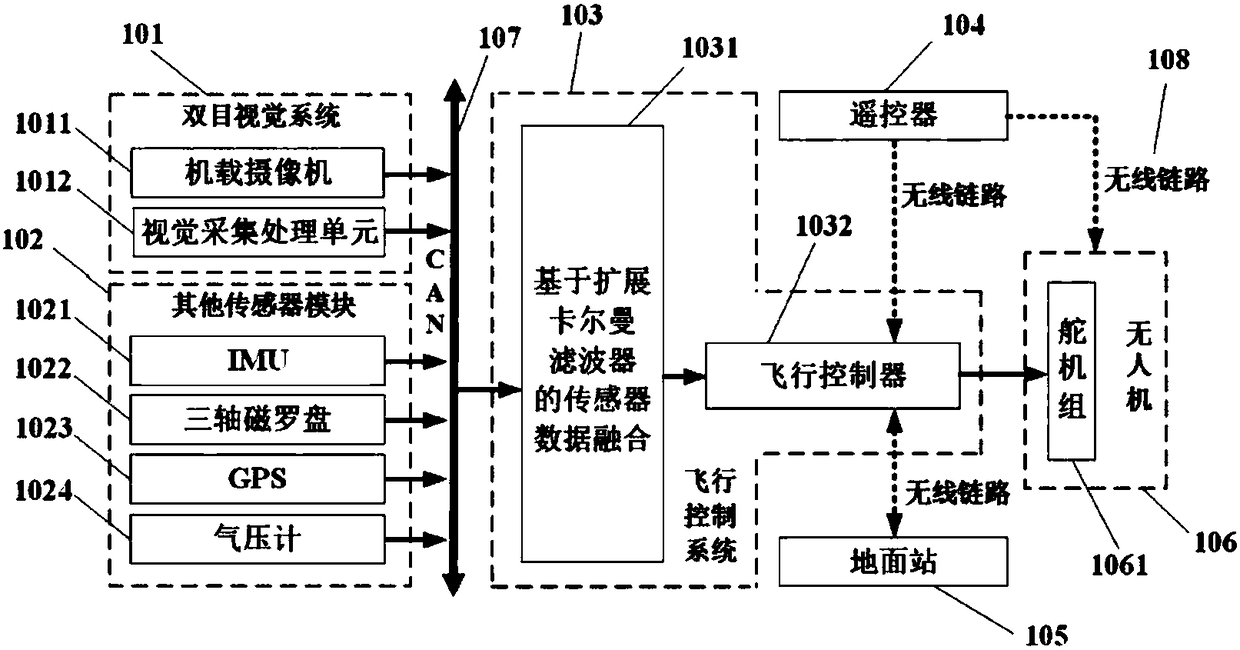
[0027] A UAV autonomous obstacle detection system based on binocular vision, such as figure 1 As shown, it includes: binocular vision system 101: including two airborne cameras 1011 and a vision acquisition processing unit 1012, the two airborne cameras 1011 obtain the environmental visual information of the drone 106, and transmit the data to the visual The collection and processing unit 1012, the visual collection and processing unit 1012 understands and analyzes the visual information, finally obtains the environment information, and at the same time judges and gives the obstacle information, and the obstacle information is sent to the flight control system 103 through the CAN bus 107.
[0028] Sensor module 102: includes inertial measurement unit IMU1021, global positioning system GPS1022, magnetic compass 1023 and barometer 1024, is used to obtain flight state information such as the flight height, flight course, flight speed, flight attitude of UAV 106; Sensor module 102 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com