Simulation method and device of digital twin system of industrial robot
A technology for industrial robots and system simulation, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., to solve problems such as unreachable axes, limited robot applications, and lack of self-adaptability of robots.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The implementation of the present invention will be described in detail below in conjunction with the drawings and examples.
[0056] (1) The establishment of an industrial robot digital twin system includes the following steps:
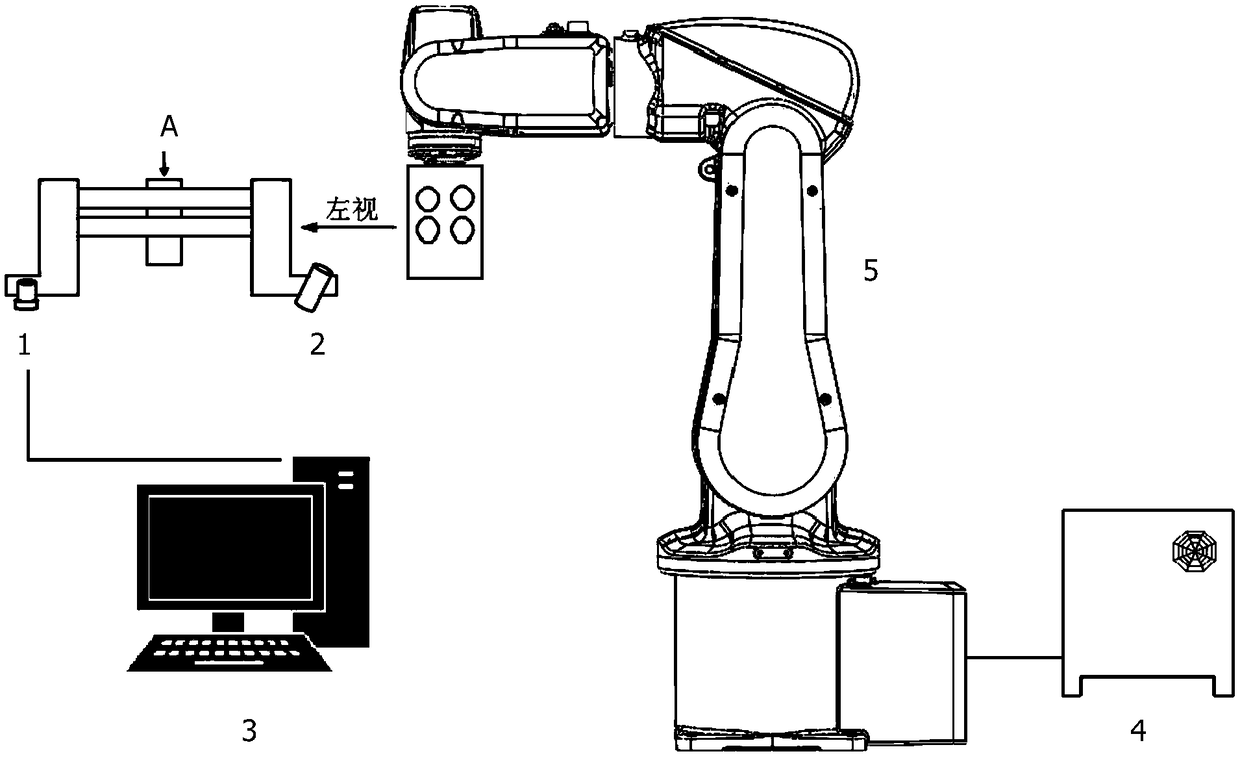
[0057] Step 1: build a hardware platform, the hardware system architecture diagram of the present invention is as follows figure 1 As shown, it includes a six-axis robot, a camera mounted on the end of the robot, a wire-structured light emitter, and a computer.
[0058] Such as figure 1 As shown, the present invention adopts an oblique structured light three-dimensional measurement structure, which has strong anti-interference ability, good real-time performance, and does not require feature matching. Install the camera and the line laser symmetrically on both sides of the end of the flange of the robot, the camera is installed vertically, and the line laser is installed obliquely at a certain angle. The present invention selects a red visi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com