Multi-AUV formation optimization control method under obstacle environment
A technology for optimizing control and formation, which is applied in three-dimensional position/channel control and other directions, and can solve problems such as performance optimization without considering formation transformation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0097] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
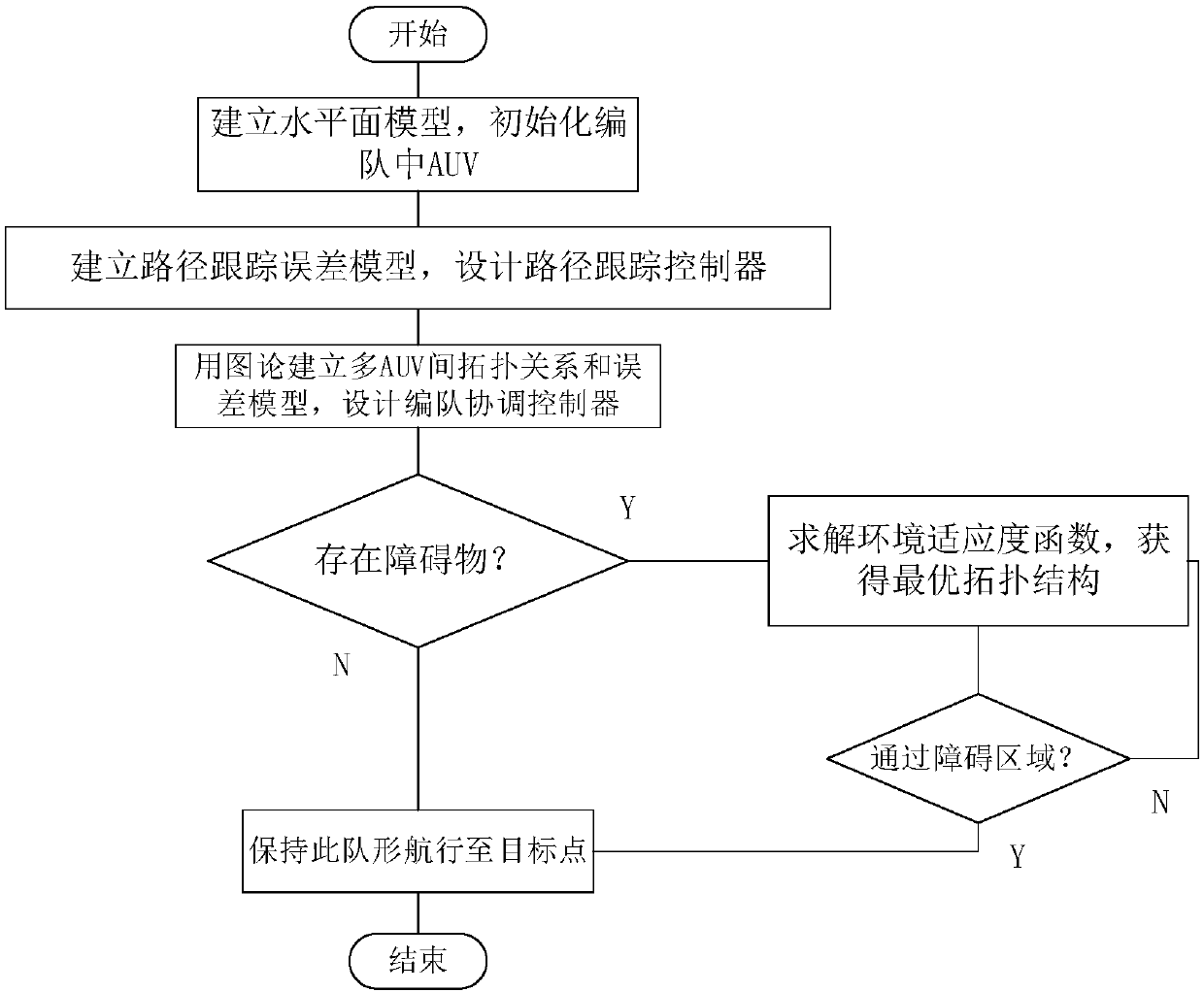
[0098] combine Figure 1 to Figure 9 , the present invention comprises the following steps:
[0099] 1. Step 1: Establish the horizontal plane model of AUV;
[0100]
[0101] in: m ur =m-Y r , d u =-X uu u 2 -X vv v 2 , d v =-Y v uv-Y v|v| v|v|,d r =-N v uv-N v|v| v|v|-N r ur. I z is the fixed moment; X {.} , Y {.} and N {.} is the hydrodynamic coefficient; x uu =-35.4Kg, Xvv =-128.4N·m 2 ,Y v =-346Kg, Y v|v| =-667Kg·m -1 , Y r =435Kg,N r =-1427Kgm, N v|v| =443Kg, N v =-686Kg, I z =2000N·m 2 , F and T represent the thrust and bow turning moment of the AUV in the longitudinal direction, u is the forward moving speed of the AUV, v is the lateral moving speed of the AUV, r is the turning speed of the AUV, x is the lateral position of the AUV, and y is the AUV Longitudinal position, ψ represents AUV h...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com