Lane decision method for automatic driving vehicles based on multi-objective decision matrix
A multi-objective decision-making and automatic driving technology, applied in the field of lane decision-making based on a multi-objective decision-making matrix, can solve problems such as too many considerations, complex calculations, lack of real-time and flexibility, etc., and achieve the effect of fast response and few parameters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] At the current level of technology, the perception system of autonomous driving vehicles mainly detects surrounding traffic conditions through cameras, radar, infrared rays, and ultrasonic waves. What can be detected includes information such as the type, speed, direction of movement, and lane of obstacles around the self-driving vehicle; traffic information such as traffic lights, road traffic lines, road speed limits, and road signs. Due to complex factors such as occlusion, illumination, and weather, the self-driving vehicle only has a high degree of confidence in the detected information of obstacles that are close to its surroundings.
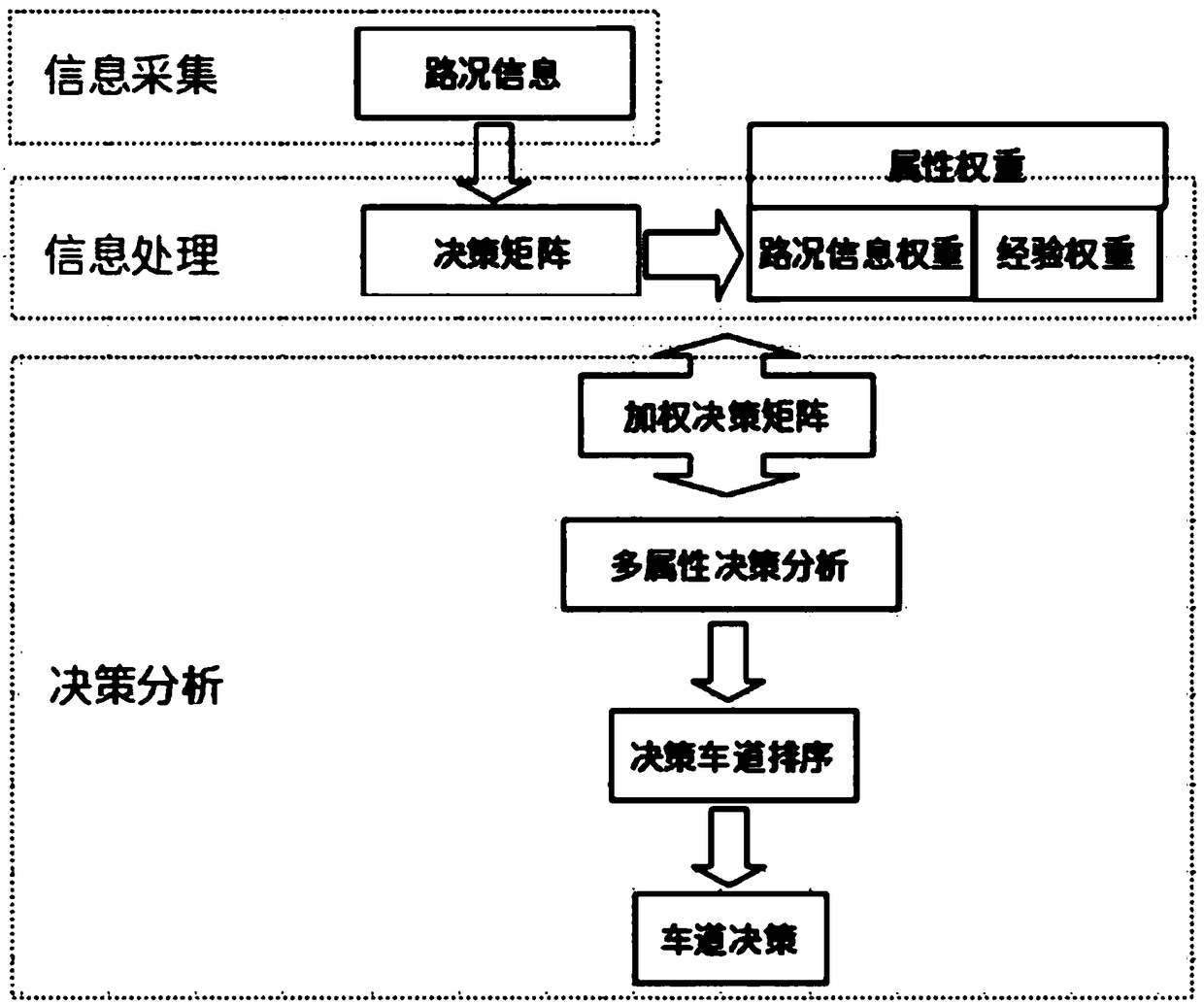
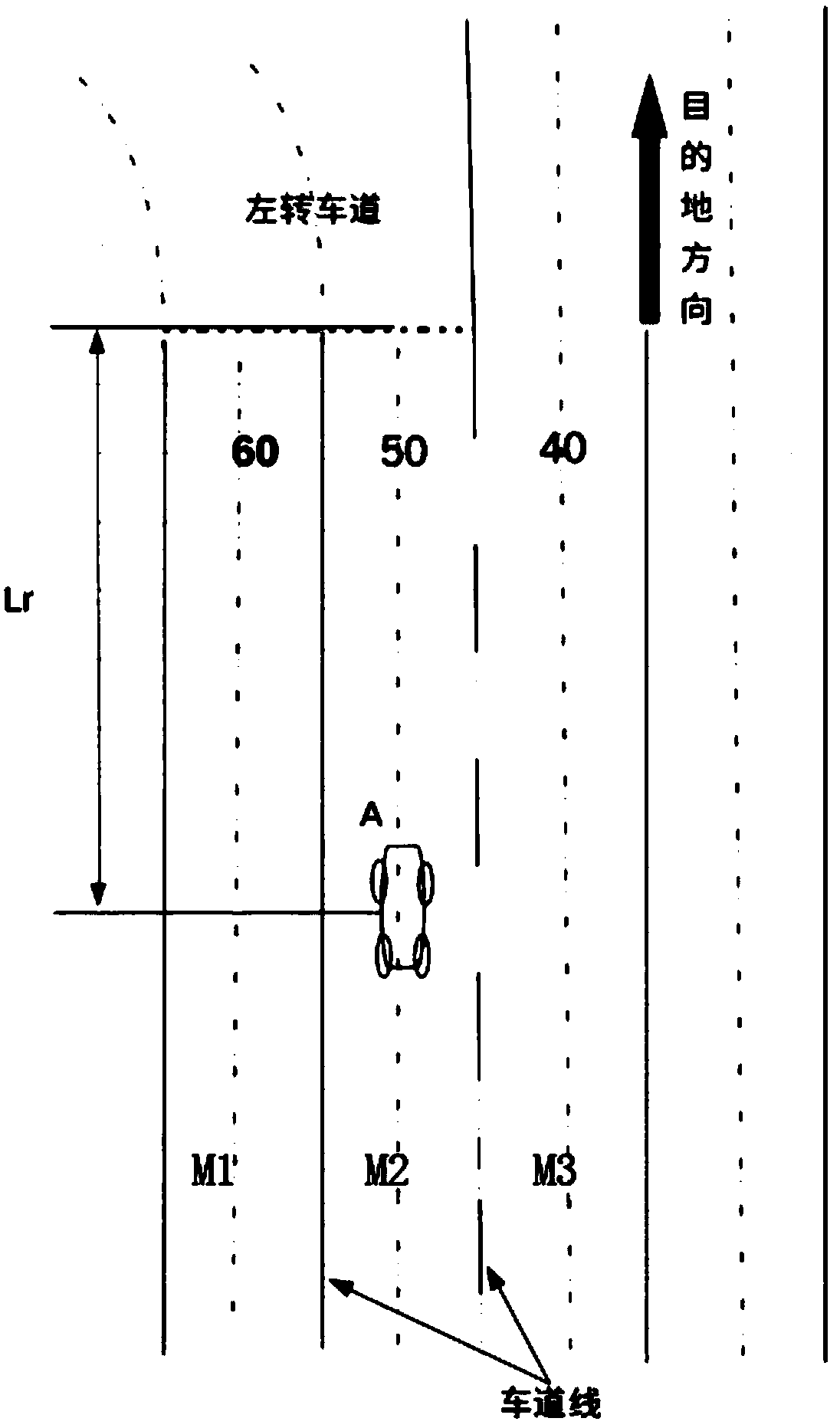
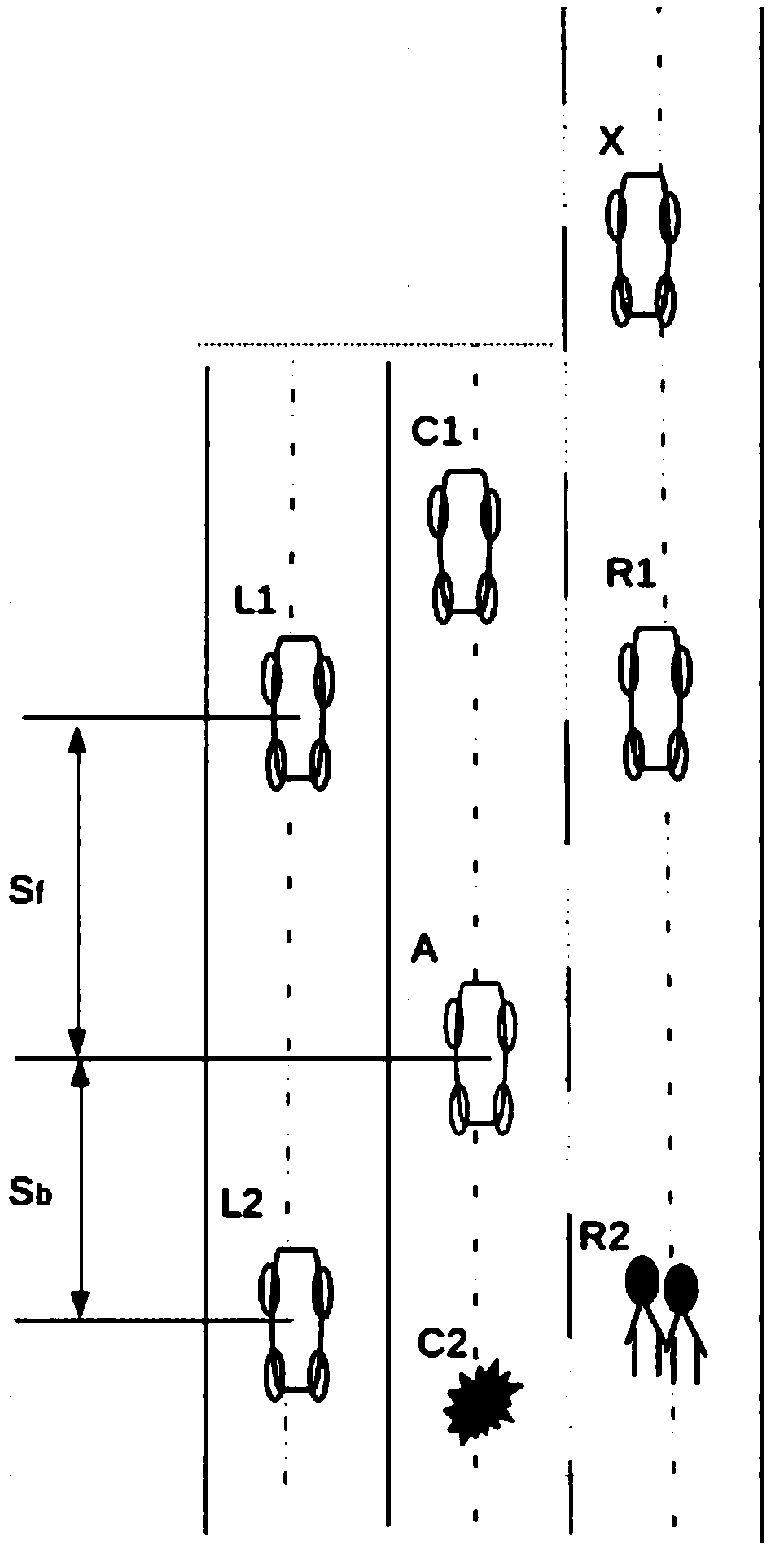
[0065] Starting from the reliability of traffic information and the feasibility of lane decision-making, the method involved in the present invention proposes to use the lane where the automatic driving vehicle is located, the left lane and the right lane of the automatic driving vehicle as the lanes to be decided, and the distance o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com