Adaptive dynamic force/position hybrid control method for control system closed robot
A hybrid control and robot technology, applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., to achieve the effect of ensuring stability and convergence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
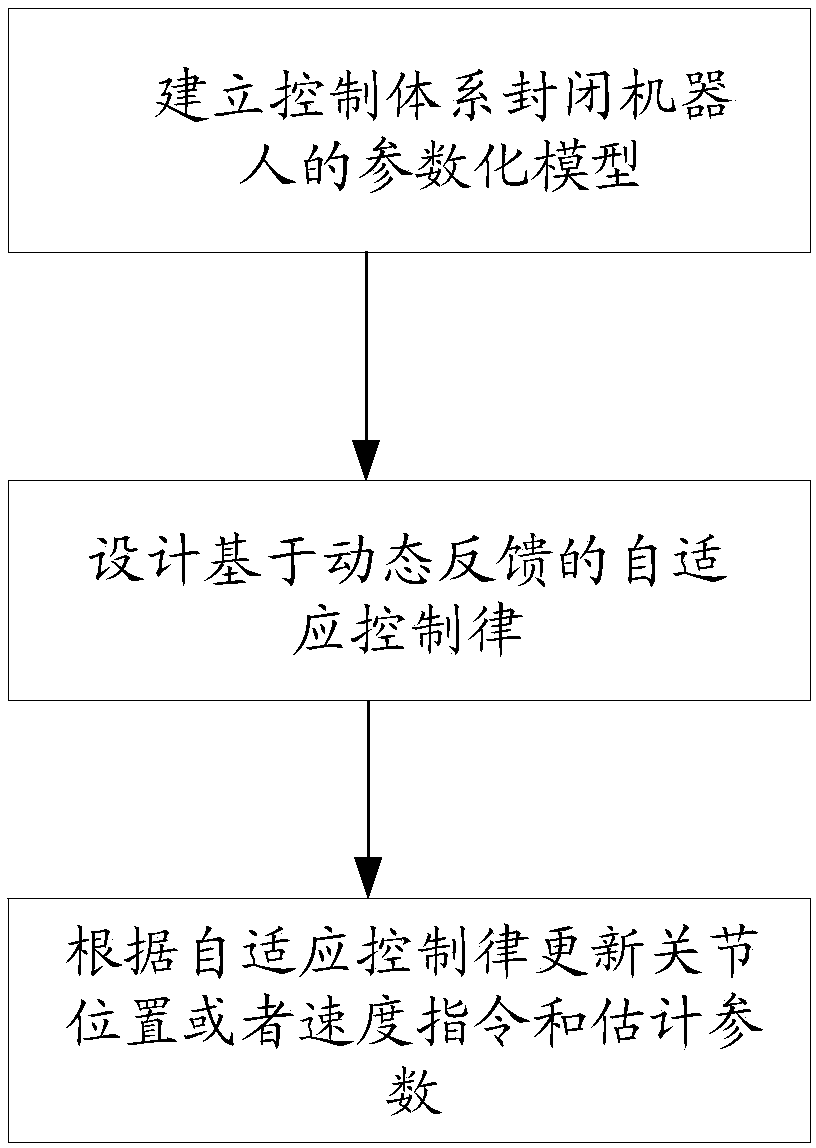
[0054] A control system closed robot adaptive dynamic force / position hybrid control method includes the following steps:
[0055] (1) Establish a parametric model of a closed robot with a control system
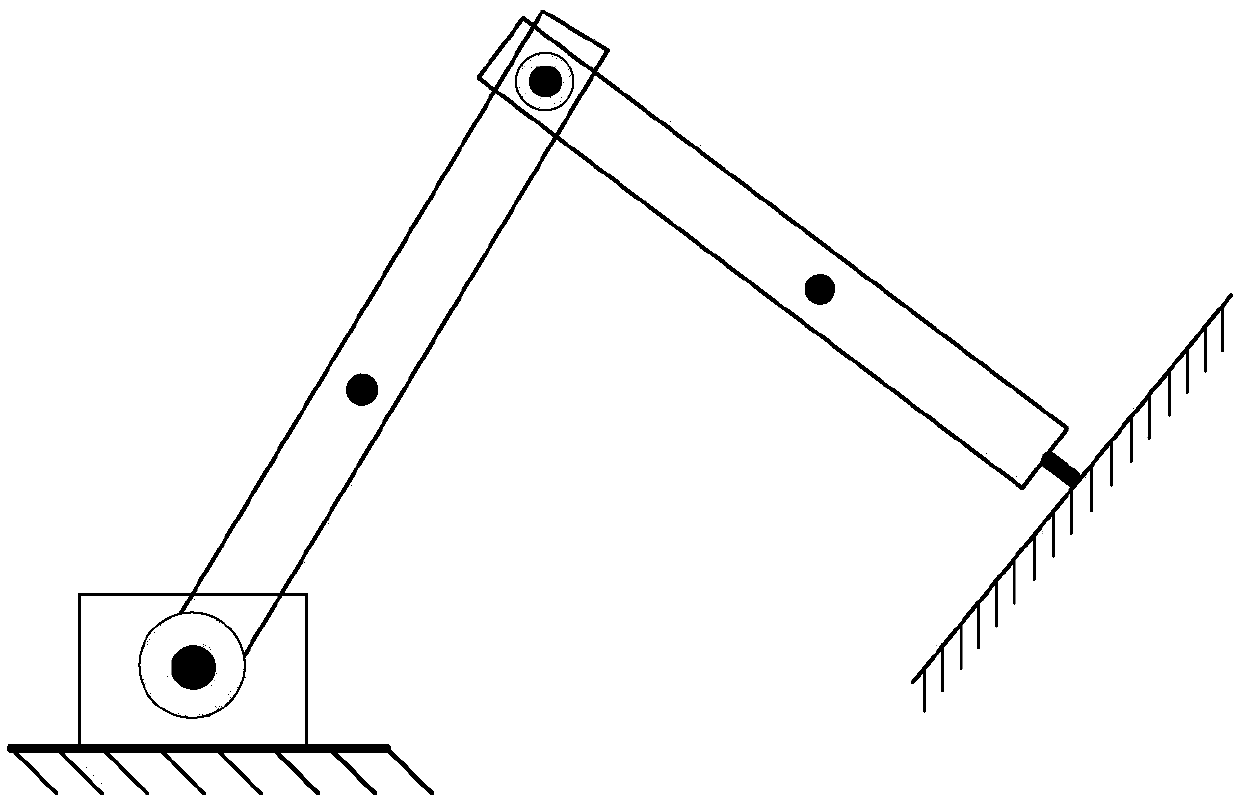
[0056] Such as figure 2 As shown, consider an n-DOF robot (n=2) touching a compliant environment. with x∈R n Indicates the end position of the manipulator, q∈R n Indicates the joint position of the manipulator, then there is a classic relation:
[0057] x=σ(q)(1)
[0058] where σ:R n →R n is a nonlinear function, R n represents an n-dimensional real space. with J(q)∈R n×n Represents the Jacobian matrix of the manipulator, then the relationship between the end speed of the manipulator and the joint speed of the manipulator can be expressed in the following classical form:
[0059]
[0060] Use δ x Indicates the amount of deformation of the environment contour due to the interaction with the end of the manipulator, then there is a classical relationship:
[0061...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com