Robust Control Method for Position Control of Tilting Trirotor UAV
A robust control and unmanned aerial vehicle technology, applied in the field of nonlinear control design of tilting three-rotor unmanned aerial vehicle position, can solve the problems of unmanned aerial vehicle dynamic model analysis and complex control and other problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0057] The technical problem to be solved by the present invention is to design a non-linear control that is robust and can ensure the stability of the position-attitude closed-loop coupled closed-loop system for the tilting three-rotor UAV that can independently control the inclination angle of the tail rudder device.
[0058] The technical scheme adopted in the present invention is: establish the position-attitude double-loop dynamic model of the tilting three-rotor UAV, and design a corresponding nonlinear controller, including the following steps:
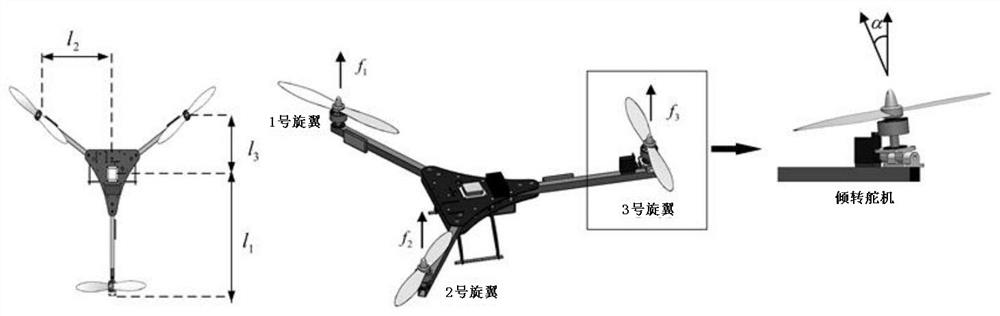
[0059] First complete the following definition: define two coordinate systems, such as figure 2 Shown are the inertial frame {I} and the body frame {B}, respectively. The origin of the inertial coordinate system {I} is located on the ground, and the origin of the body coordinate system {B} is located at the center of mass of the trirotor UAV, both of which satisfy the right-hand rule. Defined in the inertial coordinate syste...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com