Quad-rotor unmanned aerial vehicle (UAV) fault tolerance control method based on adaptive fault estimation observer
A four-rotor unmanned aerial vehicle, fault estimation technology, applied in the field of aviation aircraft control, can solve the problems that the position fault cannot be solved well, the controller design is complicated, etc., to improve safety and reliability, good fault tolerance, good Tracking the effect of the effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The principle diagram of the fault-tolerant control of the four-rotor UAV based on the adaptive fault estimation observer of the present invention is as follows figure 1 As shown, it mainly includes the following steps:
[0032] Step 1: According to the known dynamic model of the quadrotor UAV, fully considering the actuator failure of the UAV system, the attitude failure model of the quadrotor UAV is established.
[0033] According to the fault model obtained in step 1, considering that the actual UAV actuators are four rotor motors, in order to match the faults with the actuators, a new attitude fault model is derived.
[0034] According to the fault model obtained in step 2, the actuator faults are divided into two groups that are decoupled from each other, and the attitude fault model used finally is obtained.
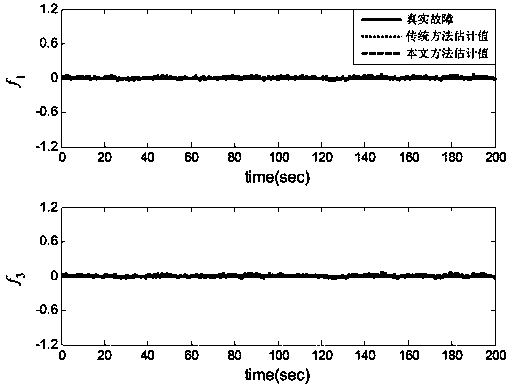
[0035] According to the fault model obtained in step 3, an adaptive fault estimation observer is designed for the two groups of faults that are decoupled f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com