Method and system for charging by means of cooperation of unmanned aerial vehicle and unmanned surface vehicle
A technology of unmanned aerial vehicles and unmanned boats, which is applied in the field of unmanned aerial vehicle collaborative unmanned boat charging, can solve the problems of short continuous working time of unmanned aerial vehicles, application constraints, and the inability to realize full autonomous control of unmanned aerial vehicles, so as to improve Sustained operation capability and range of action, to achieve the effect of full autonomous control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] In order to facilitate the understanding of those skilled in the art, the present invention will be further described below in conjunction with the embodiments and accompanying drawings, and the contents mentioned in the implementation modes are not intended to limit the present invention.
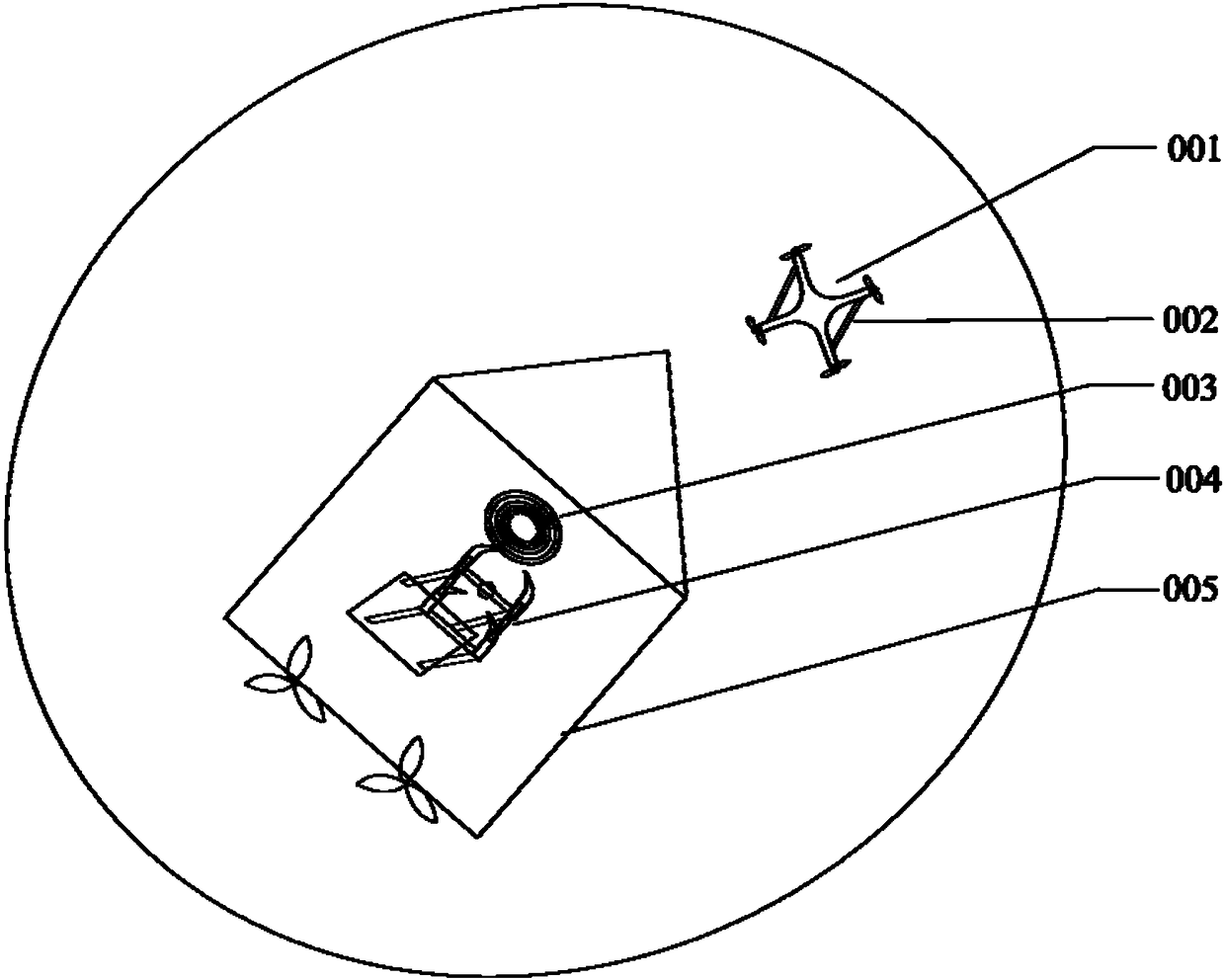
[0045] A method for unmanned aerial vehicles to coordinate unmanned boat charging, such as figure 1 shown, including:
[0046] The UAV 001 collects the image of the unmanned boat 005 in the debugging area, recognizes the position of the unmanned boat 005 in the image and the position of the marking point of the grabbing device 004, and analyzes the relative position of the marking point on the unmanned boat 005; The relative position of the marked point is identified in the image collected within the time interval Δt, and the relative displacement of the marked point is calculated by difference Δy=y t+Δt -y t , where y t Indicates the relative position of the marker point at t, y...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com