


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Suspension type multi-operation arm system
A suspension type, multi-operation technology, applied in the field of medical equipment, to achieve the effect of improving operation efficiency, reducing labor intensity, and reducing communication links
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
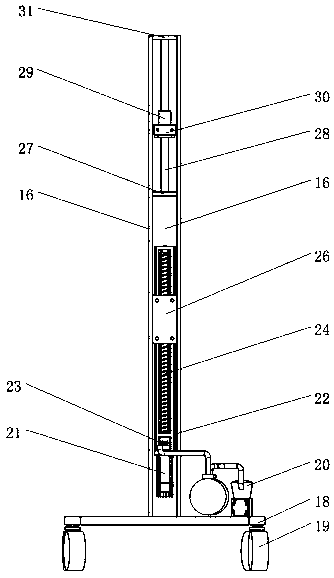
[0030]refer to figure 1 , the suspended multi-operating arm system is composed of lifting joint 42, rotating joint 41, telescopic joint 40, and light-load operating arms. There are two light-load operating arms. The light-load operating arms include light-load operating arm A1 and light-load operating Arm B2. Two light-loaded operating arms are fixed at the end of the suspended positioning arm, and the suspended positioning arm can lift, push, pull and rotate the entire end; the surgical instrument is fixed at the end of the light-loaded operating arm, and the posture and position of the surgical instrument can be positioned and controlled. The lifting joint 42 is used to adjust the overall height of the boom, the rotating joint 41 is used to adjust the swing angle of the telescopic joint 40, and the telescopic joint 40 is used to adjust the working range of the light-loaded operating arm connected to it relative to the operating table; The light-loaded operating arm is compa...
Embodiment 2
[0042] This embodiment is obtained on the basis of Embodiment 1. In this embodiment, the ball screw and nut in the lifting joint and the telescopic joint are replaced with a sliding screw and nut. Other parts and structures remain unchanged, and the same can be done. Complete the positioning function of tools and instruments.
Embodiment 3
[0044] In this embodiment, the central axis of the straight cylindrical cross bar at both ends of the tooth-shaped steering cross bar 4 in the first embodiment is replaced with a profile with an arc or broken line shape, and its cross section is a circular or other polygonal structure, and other parts remain constant. It is also possible to adjust the relative installation positions and installation directions of the pneumatically operated arms 1 and 2 .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com