Soft robot that can balance contact force autonomously
A robot and contact force technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as unbalanced contact force and damage to the operated object
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The present invention will be further described in detail with reference to the accompanying drawings and embodiments.
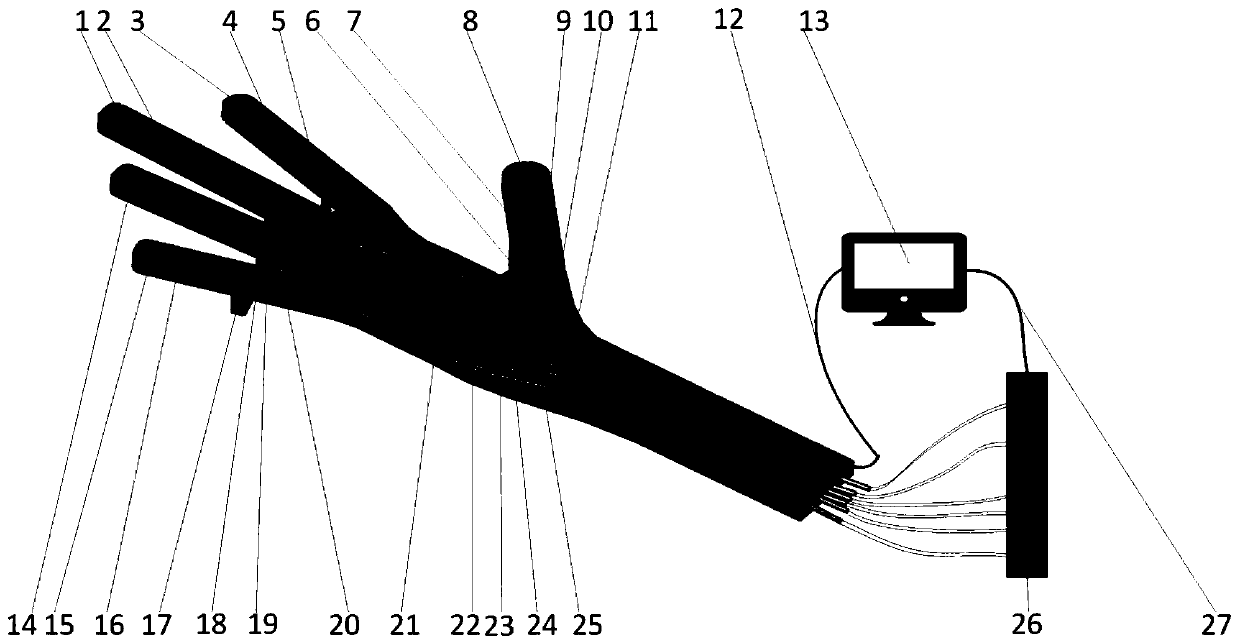
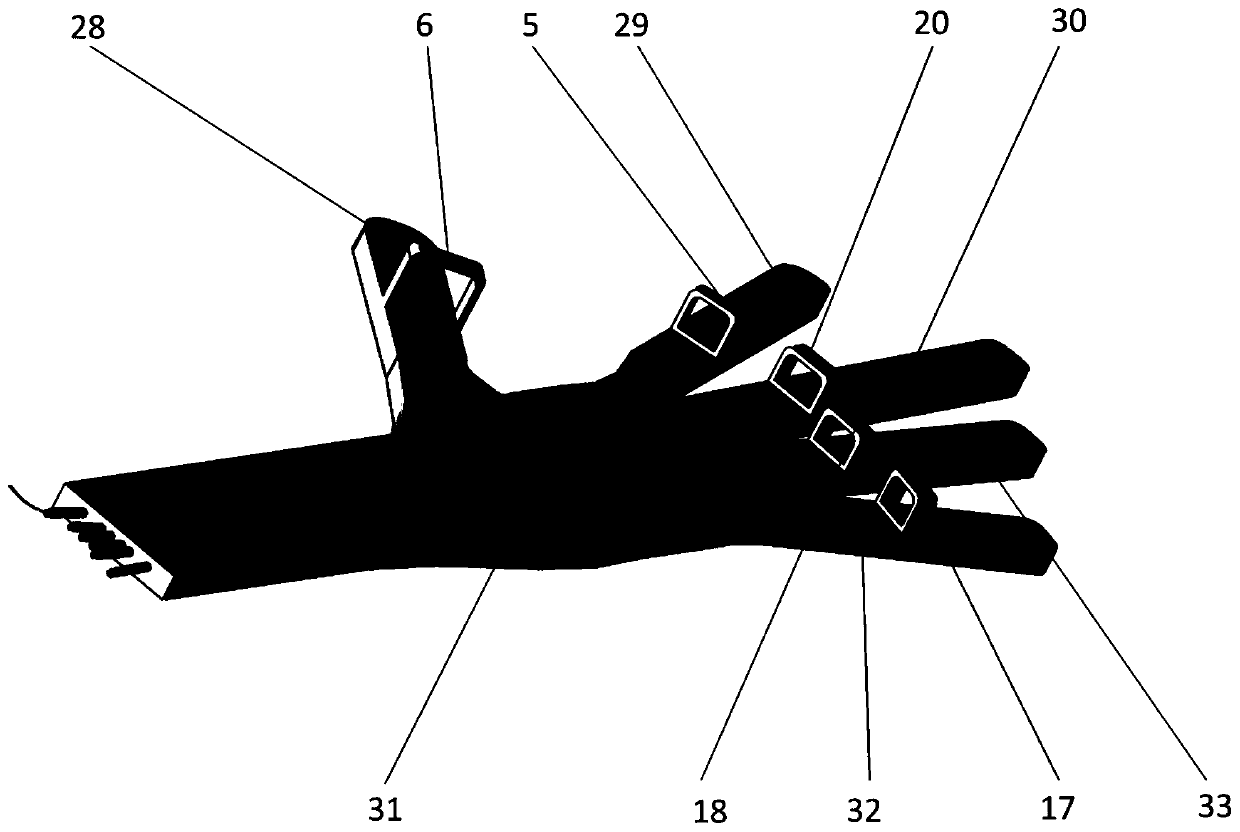
[0016] The present invention is a soft robot capable of autonomously balancing contact force, comprising a first force sensor 1, a first soft finger cavity 2, a second force sensor 3, a second soft finger cavity 4, a first fixing ring 5, a second fixing ring Ring 6, the third soft finger cavity 7, the third force sensor 8, the first flexible air tube 9, the second flexible air tube 10, the third flexible air tube 11, the first wire 12, the control system 13, the fourth force sensor 14, The fifth force sensor 15, the fourth soft finger cavity 16, the third fixed ring 17, the fourth fixed ring 18, the fifth soft finger cavity 19, the fifth fixed ring 20, the sixth force sensor 21, the soft palm cavity 22. The fourth soft air tube 23, the fifth soft air tube 24, the sixth soft air tube 25, the air pump 26, the second lead wire 27, the first soft robot fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com