A lower limb assist exoskeleton device and its dynamic joint device
A power device and joint technology, applied in the field of power joint devices, can solve the problems of heavy weight, difficult to guarantee accuracy, undisclosed, etc., and achieve the effects of simplifying design complexity, precise and flexible control, and wide adaptability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
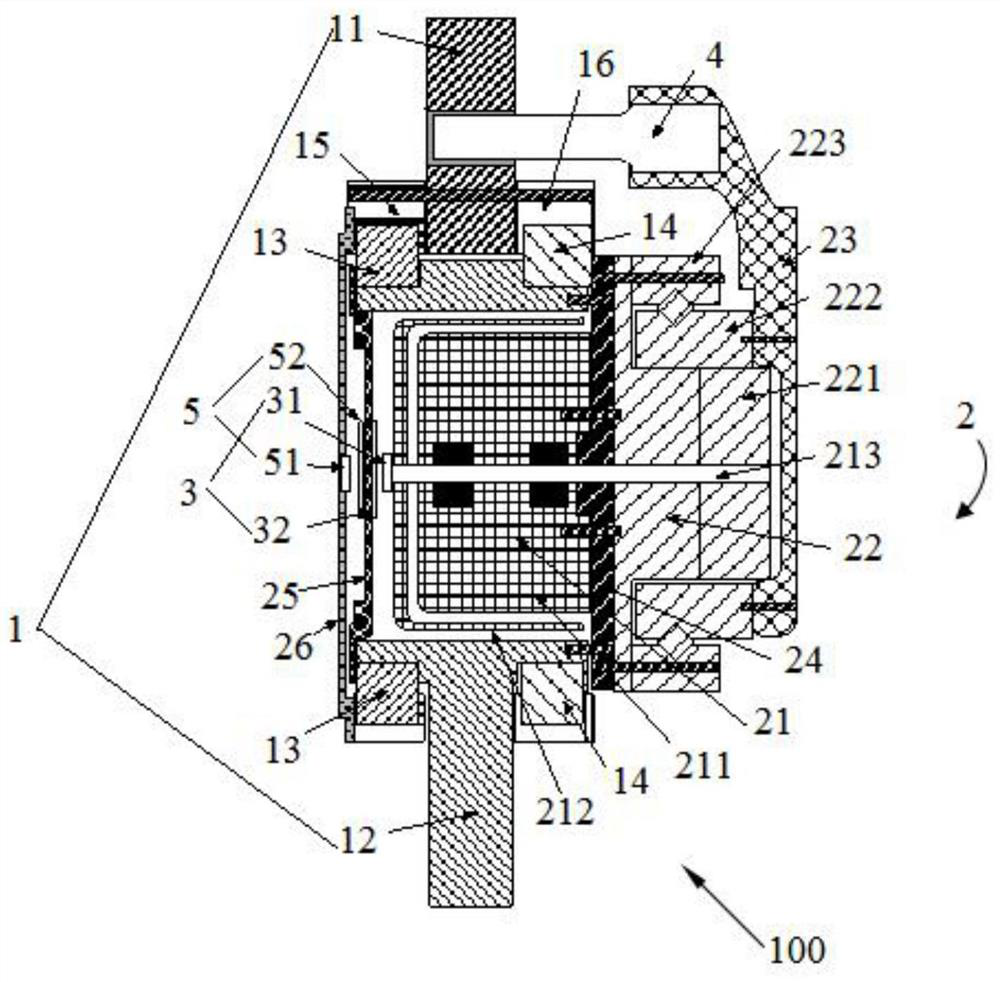
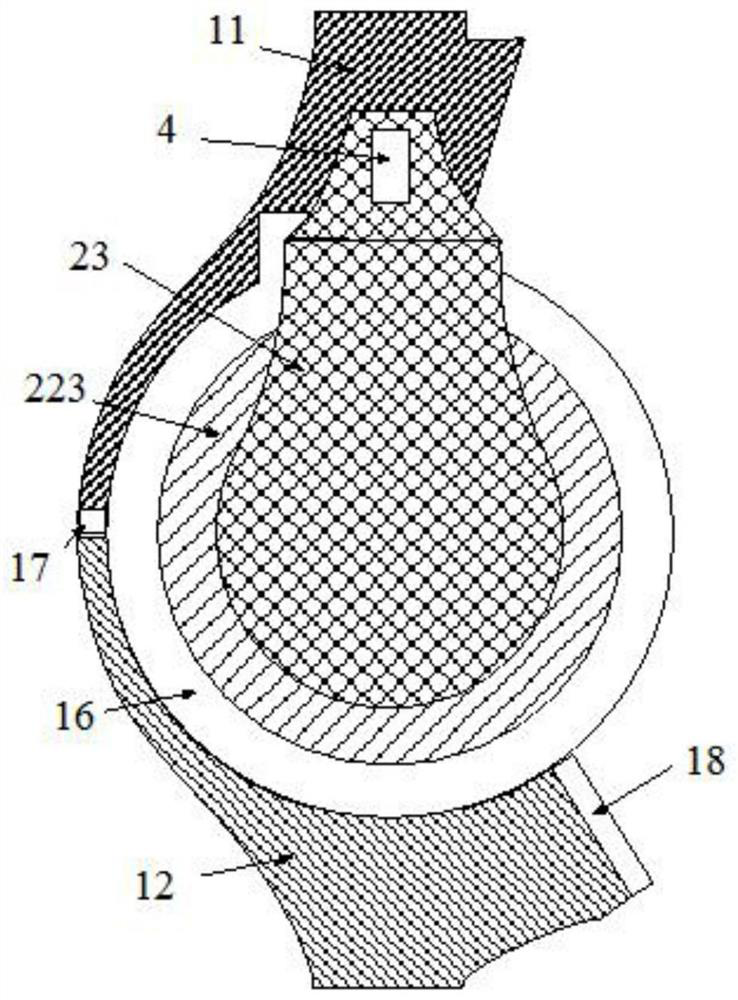
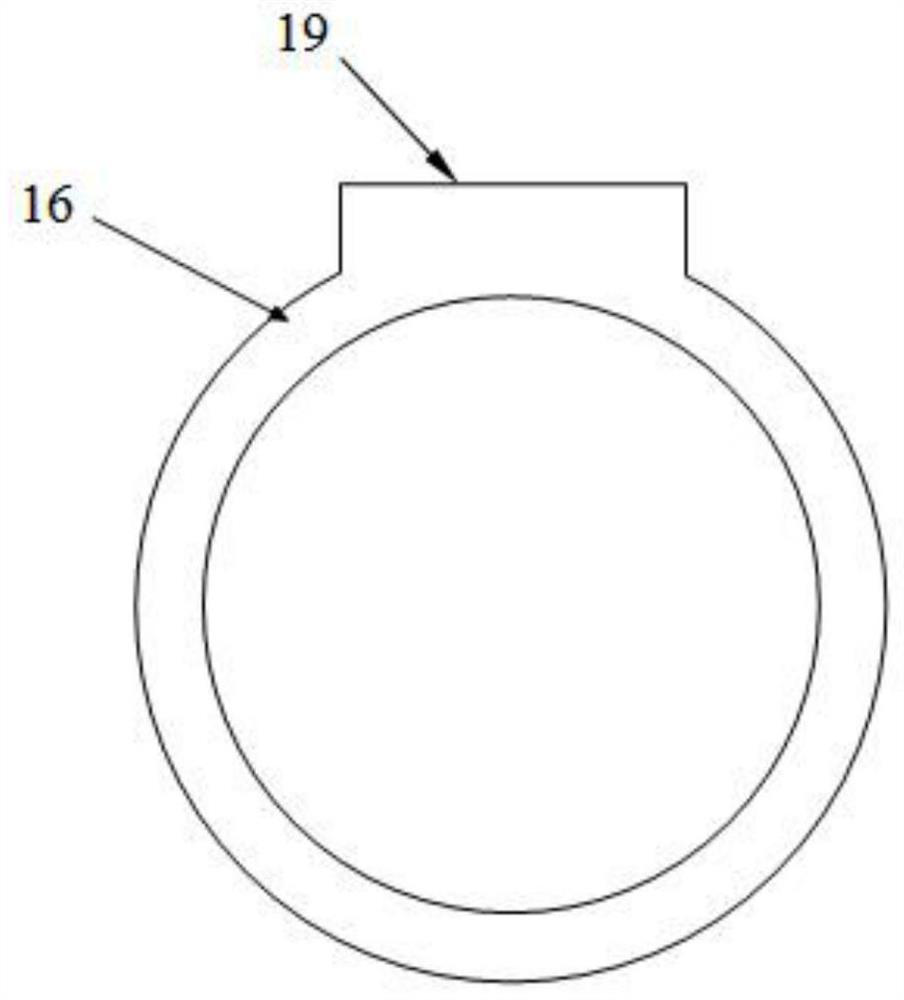
[0040] A power joint device 100, comprising a joint body 1 and a power device 2, the joint body includes an upper arm 11 and a lower arm 12, the upper part of the lower arm 12 is a cavity with openings on both sides, and the two sides of the cavity A first bearing 13 and a second bearing 14 are respectively sleeved on the outer wall, and a first bearing sleeve 15 and a second bearing sleeve 16 are respectively sleeved outside the first bearing 13 and the second bearing 14. The first bearing sleeve 15 and the second bearing sleeve 16 clamp the upper arm 11 in the middle, the first bearing sleeve 15 and the second bearing sleeve 16 have handles 19, and are tightly fixedly connected with the upper arm 11 through the respective handles 19 , so that the upper arm 11 and the lower arm 12 can rotate relatively freely, and both have a strong load-bearing capacity; the upper arm 11 and the lower arm 12 are distributed on a plane, so that the joint device will not produce Lateral torque...
Embodiment 2
[0047] A power joint device 100, comprising a joint body 1 and a power device 2, the joint body includes an upper arm 11 and a lower arm 12, the upper part of the lower arm 12 is a cavity with openings on both sides, and the two sides of the cavity A first bearing 13 and a second bearing 14 are respectively sleeved on the outer wall, and a first bearing sleeve 15 and a second bearing sleeve 16 are respectively sleeved outside the first bearing 13 and the second bearing 14. The first bearing sleeve 15 and the second bearing sleeve 16 clamp the upper arm 11 in the middle, the first bearing sleeve 15 and the second bearing sleeve 16 have handles 19, and are tightly fixedly connected with the upper arm 11 through the respective handles 19 , so that the upper arm 11 and the lower arm 12 can rotate relatively freely, and both have a strong load-bearing capacity; the upper arm 11 and the lower arm 12 are distributed on a plane, so that the joint device will not produce Lateral torque...
Embodiment 3
[0057] A dynamic joint device 100, such as Figure 1-3 As shown, it includes a joint main body 1 and a power unit 2. The joint main body includes an upper arm 11 and a lower arm 12. The upper part of the lower arm 12 is a cavity with openings on both sides. The outer walls of the cavity are respectively covered with Connected with a first bearing 13 and a second bearing 14, the first bearing 13 and the second bearing 14 are respectively sleeved with a first bearing sleeve 15 and a second bearing sleeve 16, and the first bearing sleeve 15 and the second Bearing sleeve 16 clamps upper arm 11 in the middle, and described first bearing sleeve 15 and second bearing sleeve 16 have shank 19, and all through respective shank 19 and upper arm 11 are tightly fixedly connected together by screw, so described The upper arm 11 and the lower arm 12 can rotate relatively freely, and both have a strong load-bearing capacity; the upper arm 11 and the lower arm 12 are distributed on a plane, so...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com