Tendon type bionic finger device of robot
A robot and finger technology, applied in the field of tendon-type bionic finger devices, can solve the problems of unfavorable mass consumption of consumer robots, unfavorable quantitative production of robots, complex control, etc., and achieve the effect of stable movement, simple control, and high degree of human imitation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
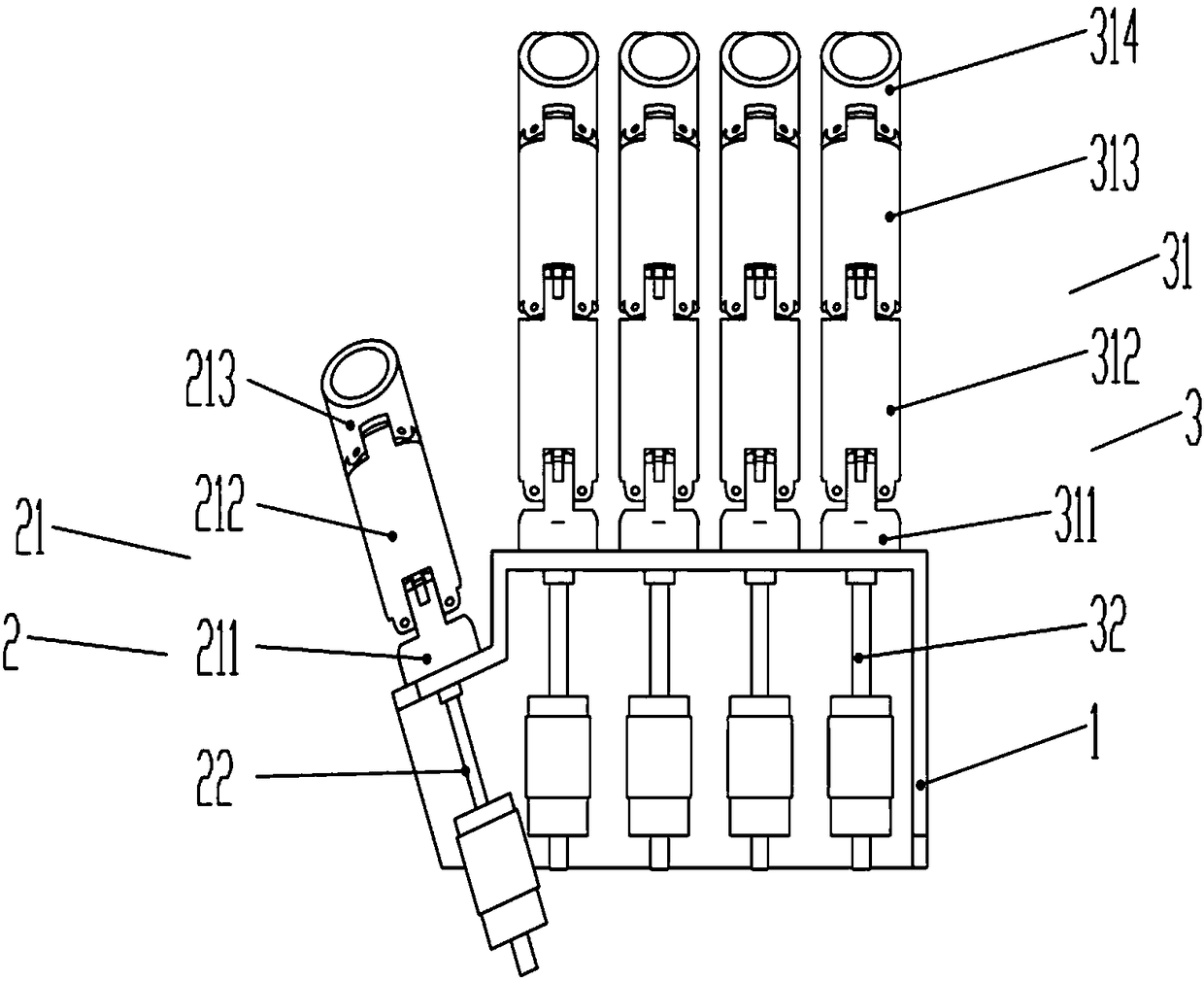
[0017] like Figure 1-4 As shown, a rib type bionic finger device of a robot comprises a base 1, a thumb device 2 and a four-finger device 3; there are four four-finger devices 3, which are respectively an index finger device, a middle finger device, a ring finger device and a little finger device device.
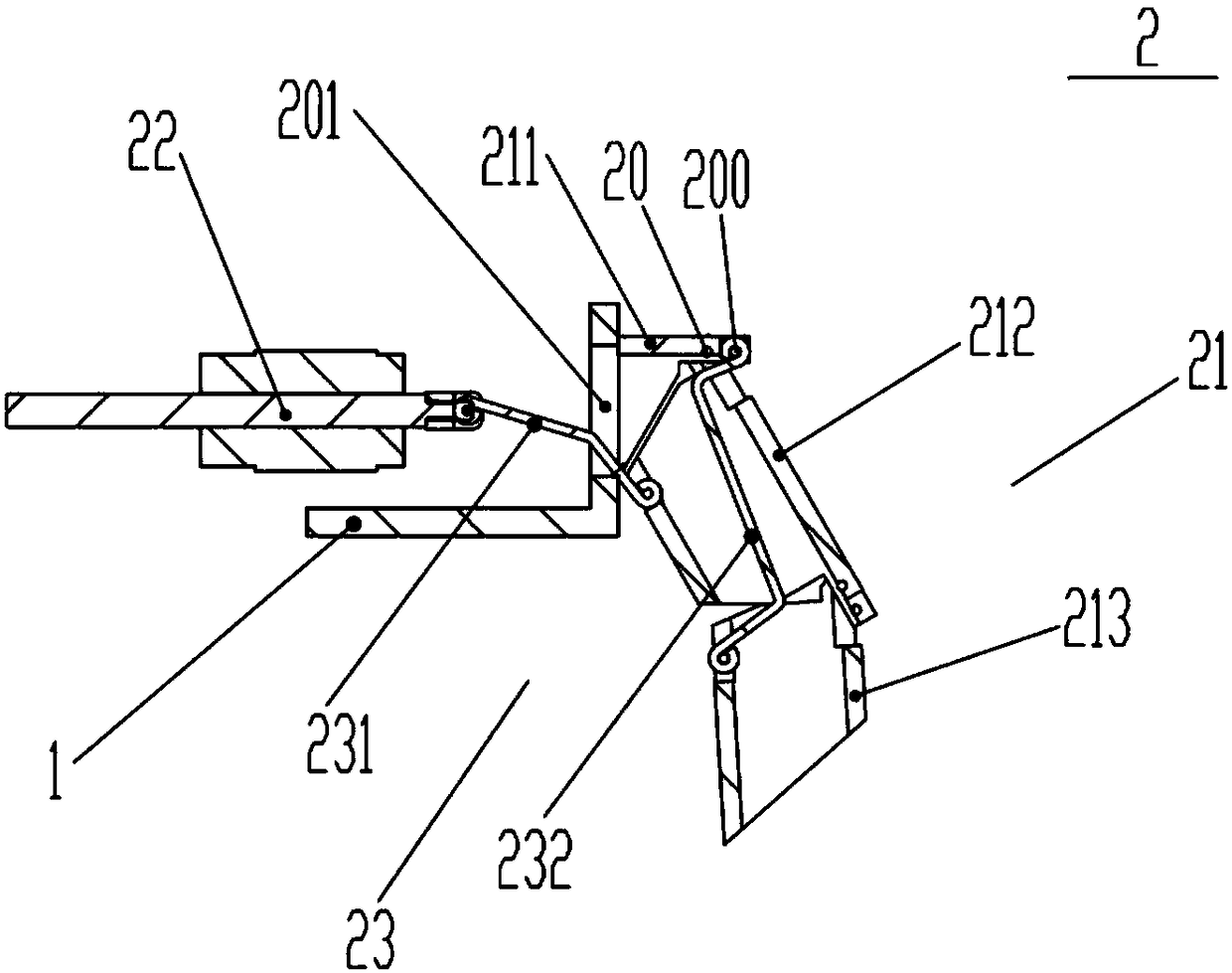
[0018] The thumb device 2 includes a thumb knuckle 21, a thumb linear drive element 22 and a thumb linkage mechanism 23. The thumb linear drive element 22 is located on one side of the base 1, and the thumb knuckle 21 is located on the base. On the other side of the seat 1, the thumb linear drive element 22 is connected with the thumb linkage mechanism 23 to drive the thumb knuckle 21 to move;
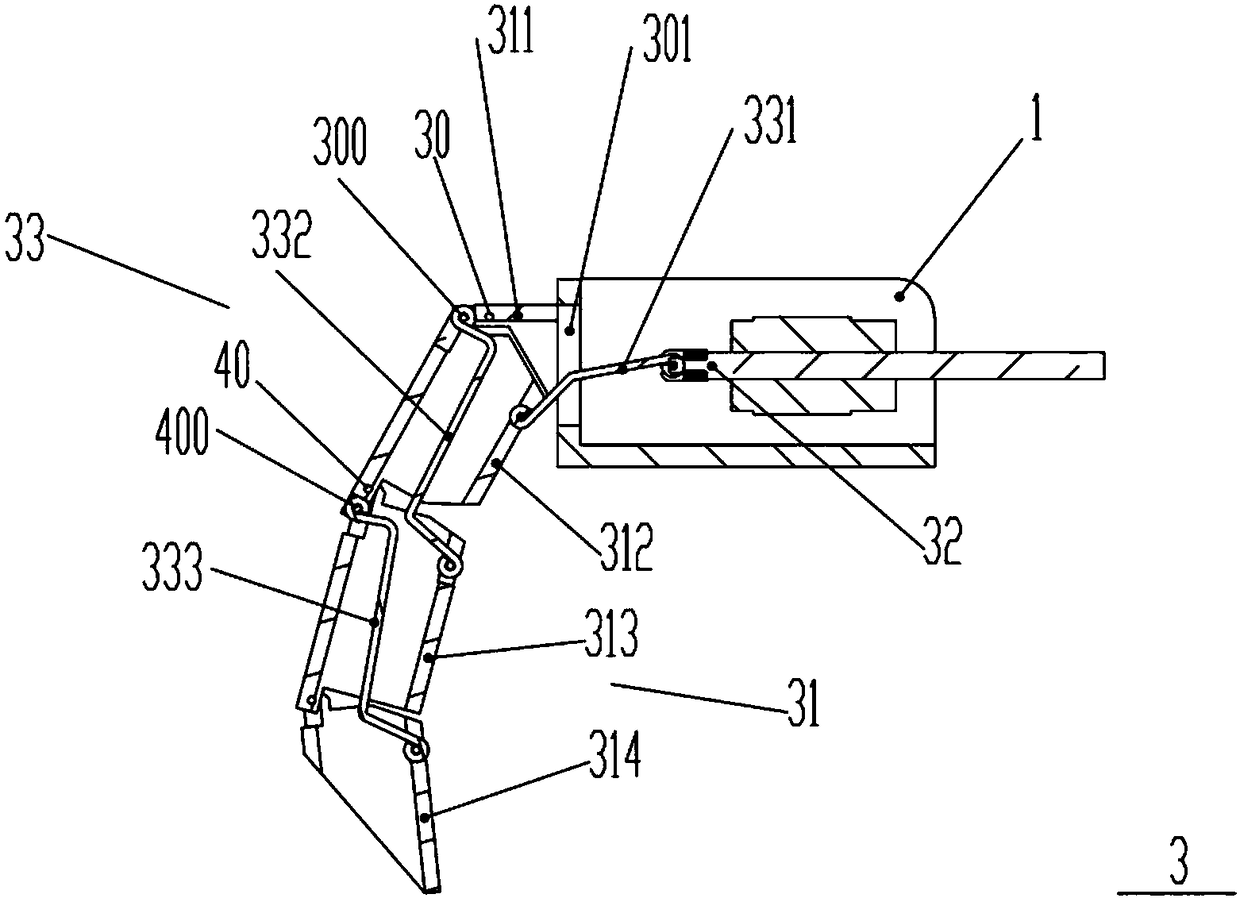
[0019] The four-finger device 3 includes a four-finger knuckle 31, a four-finger linear drive element 32 and a four-finger linkage mechanism 33. On the other side, the four-finger linear drive element 32 is connected with the four-finger linkage mechanism 33 to drive the four knuc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com