Intelligent control method based on adaptive planning of virtual ship for under-drive unmanned ship formation
An intelligent control and self-adaptive technology, applied in self-adaptive control, non-electric variable control, two-dimensional position/channel control, etc., can solve problems such as difficulty in meeting real-time engineering requirements, long online learning time, dimension disaster, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
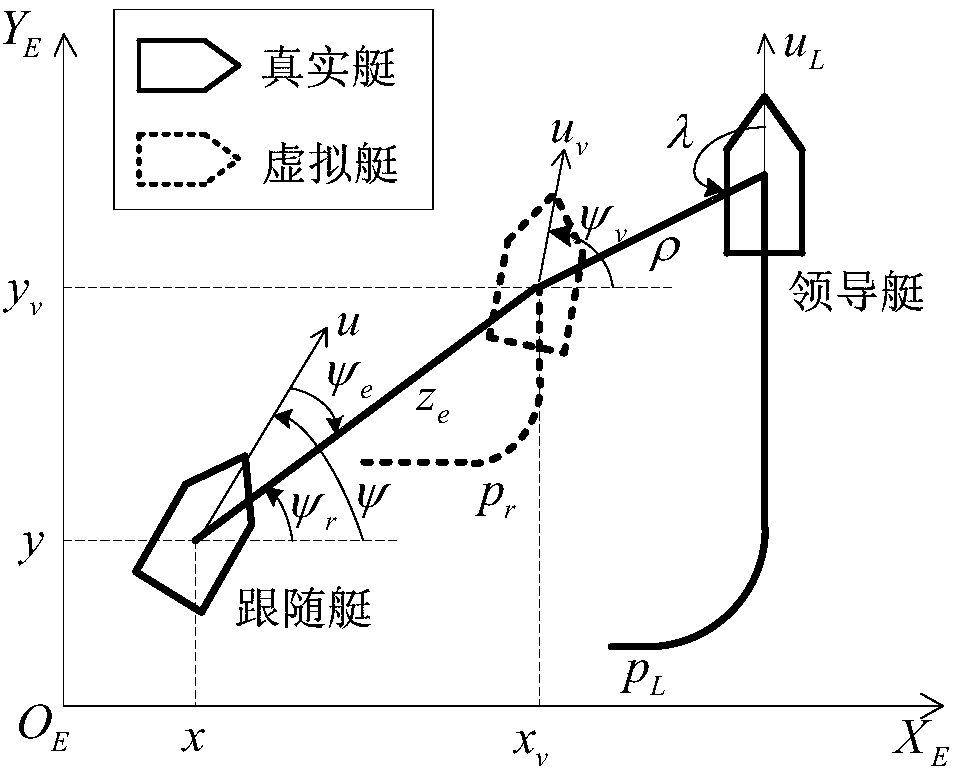
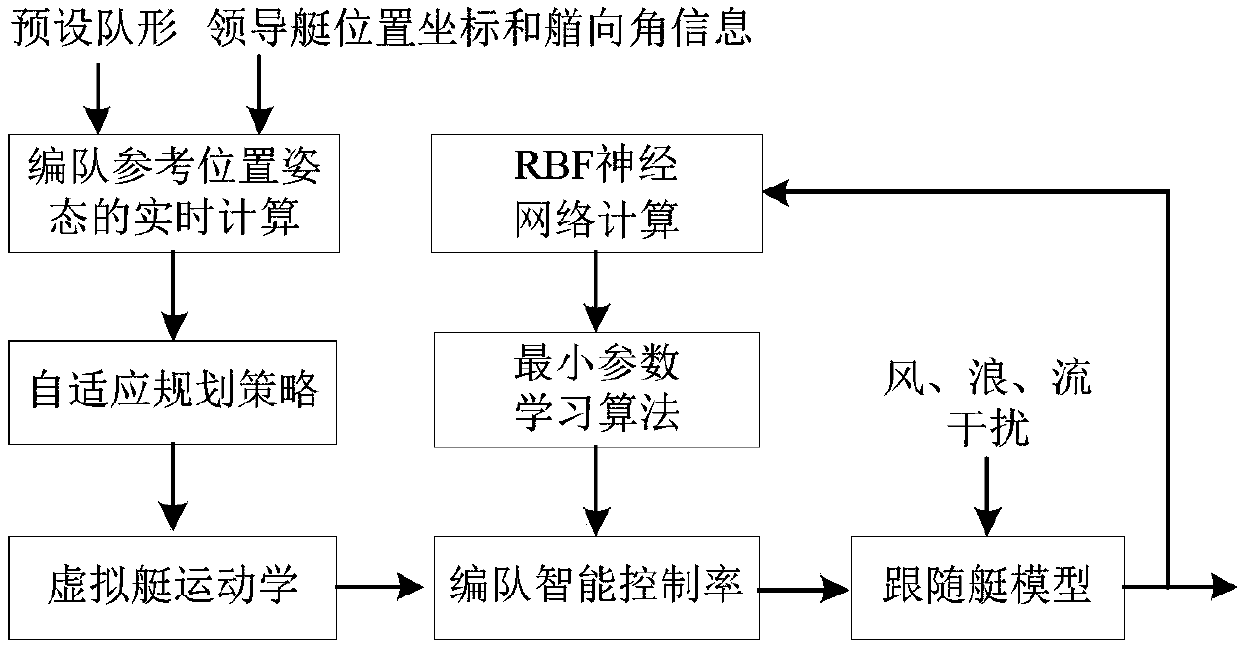
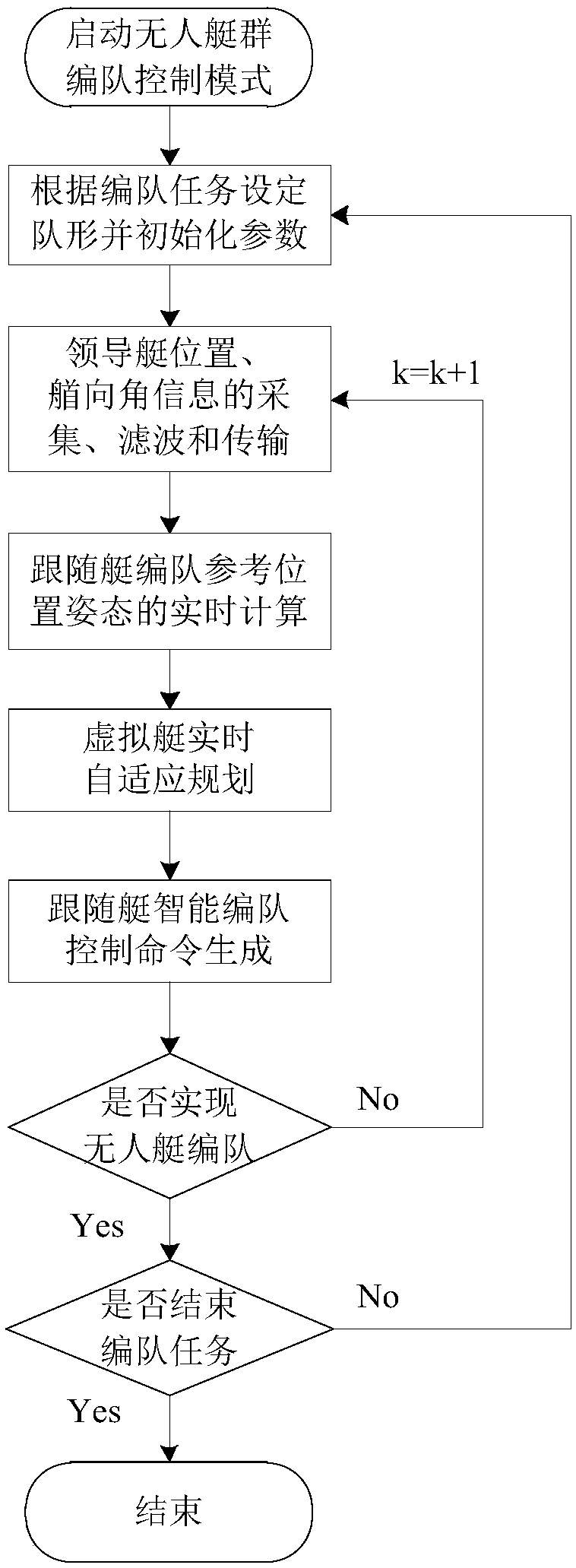
[0069] Such as Figure 1-3 As shown, the present invention provides a method for intelligent control of underactuated unmanned boat formation based on virtual boat adaptive planning. The calculation in the method is implemented by software in the control unit of the unmanned boat. The control unit can be an industrial computer or a small of embedded systems. Taking the electric drive unmanned boat swarm as an example, the implementation process of this method includes the following five specific implementation steps.
[0070] Step 1: Set formation and initialize parameters. Set the formation between the following boat and the leading boat according to the task requirements of the unmanned boat group, including the relative distance ρ and the angle λ between the following boat and the leading boat’s advancing direction; at the same time, set the initial value of the adaptive parameters of the virtual boat Initial values for learning parameters and Control parameter Γ ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com