Multi-freedom-degree hollow coordinative mechanical arm
A degree of freedom, robotic arm technology, applied in the field of robotics, can solve the problems of no redundant degrees of freedom, lack of flexibility, and lack of heat dissipation in the robotic arm, and achieve the effects of compact structure, reasonable space utilization, and simple maintenance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be described in detail below in conjunction with the accompanying drawings and specific installation and working methods.
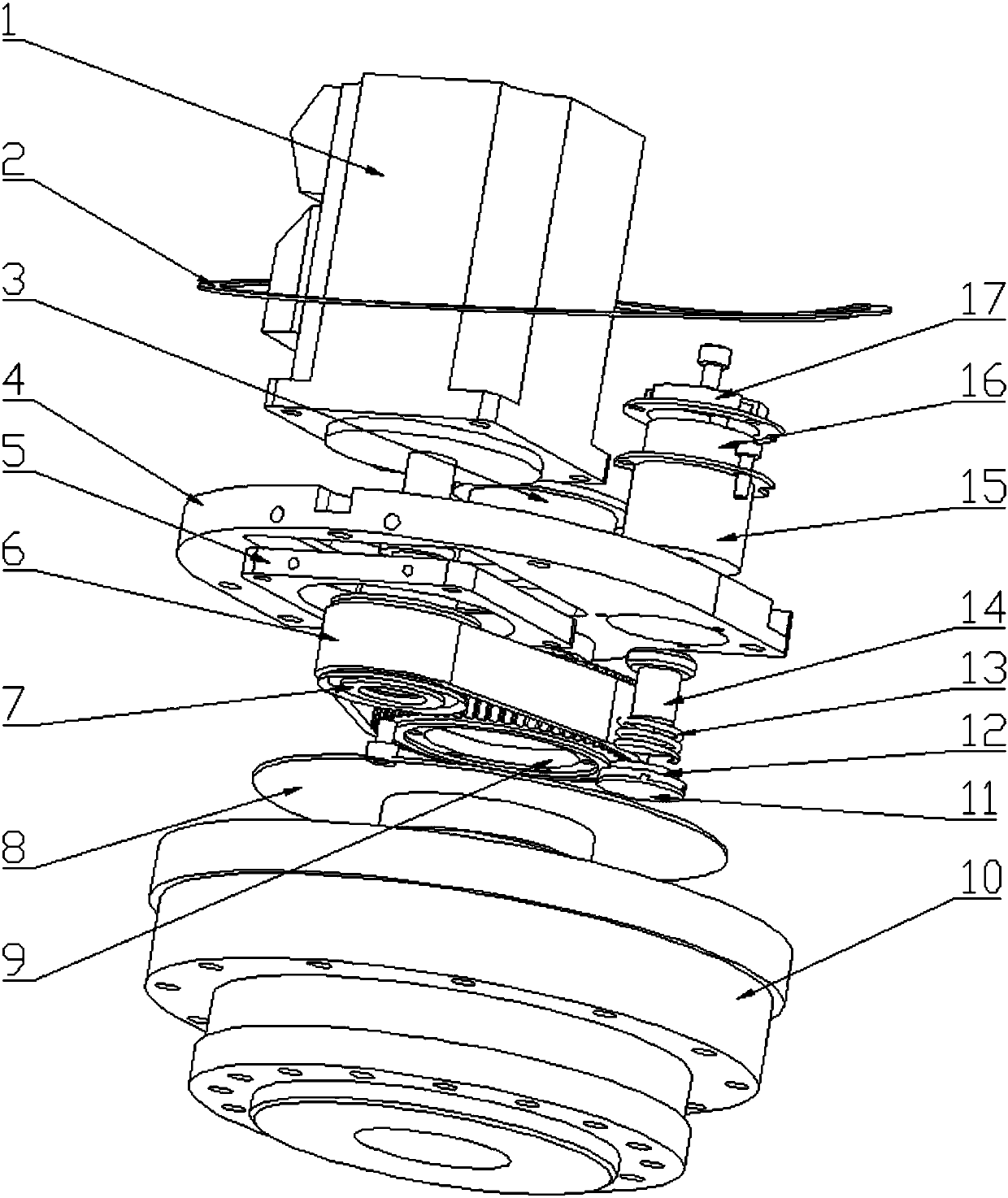
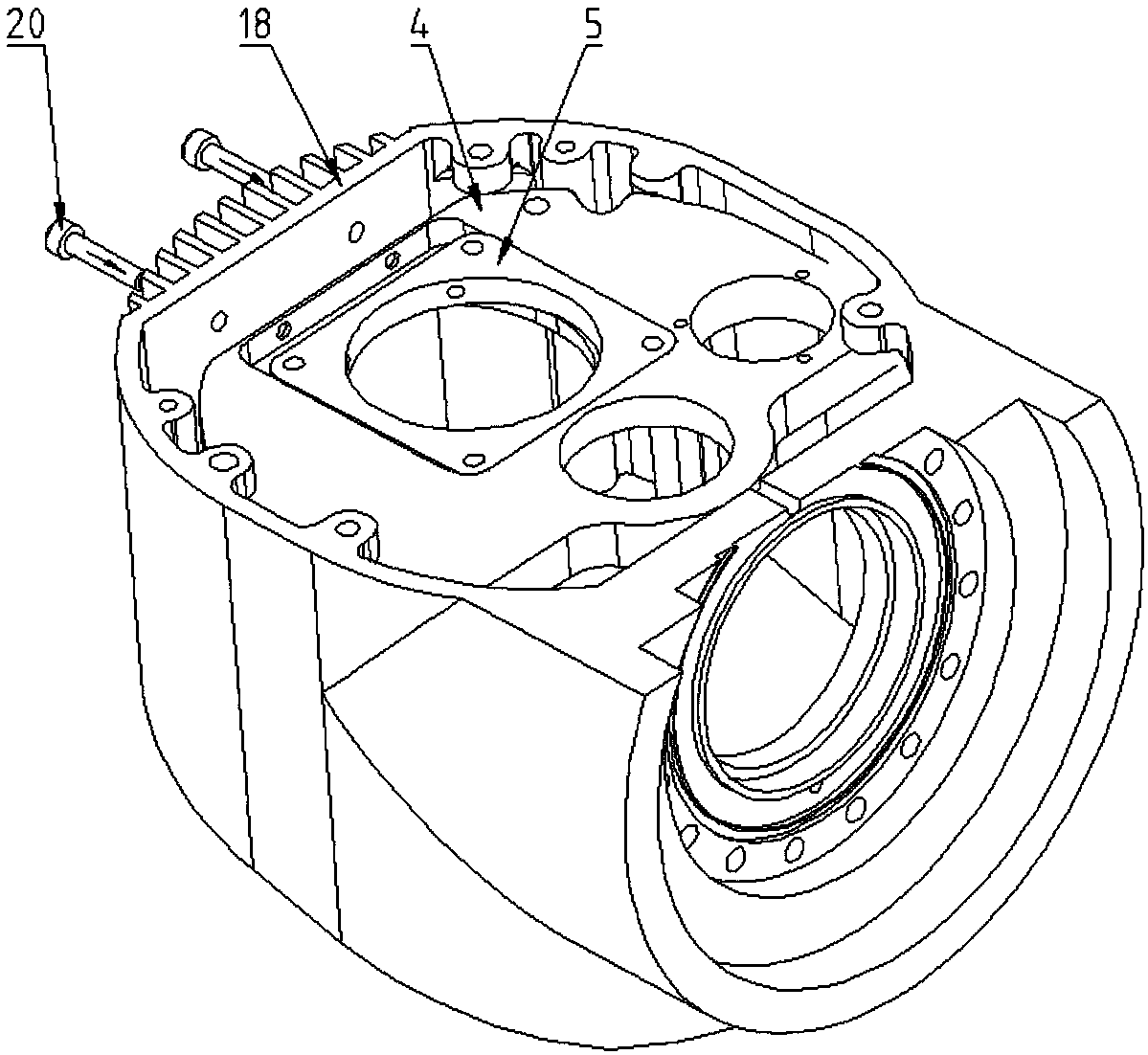
[0025] As shown in the accompanying drawings, the multi-DOF hollow cooperative robot arm of the present invention includes seven joint modules with the same structure, and the seven joint modules are respectively the first joint module 22, the second joint module 23, the third joint module 25, The fourth joint module 26, the fifth joint module 28, the sixth joint module 29 and the seventh joint module 30, each joint module includes a housing 18, and an end cover 19 is installed on the top of the housing 18, preferably on the A sealing ring 2 is installed between the shell 18 and the end cover 19 described above.
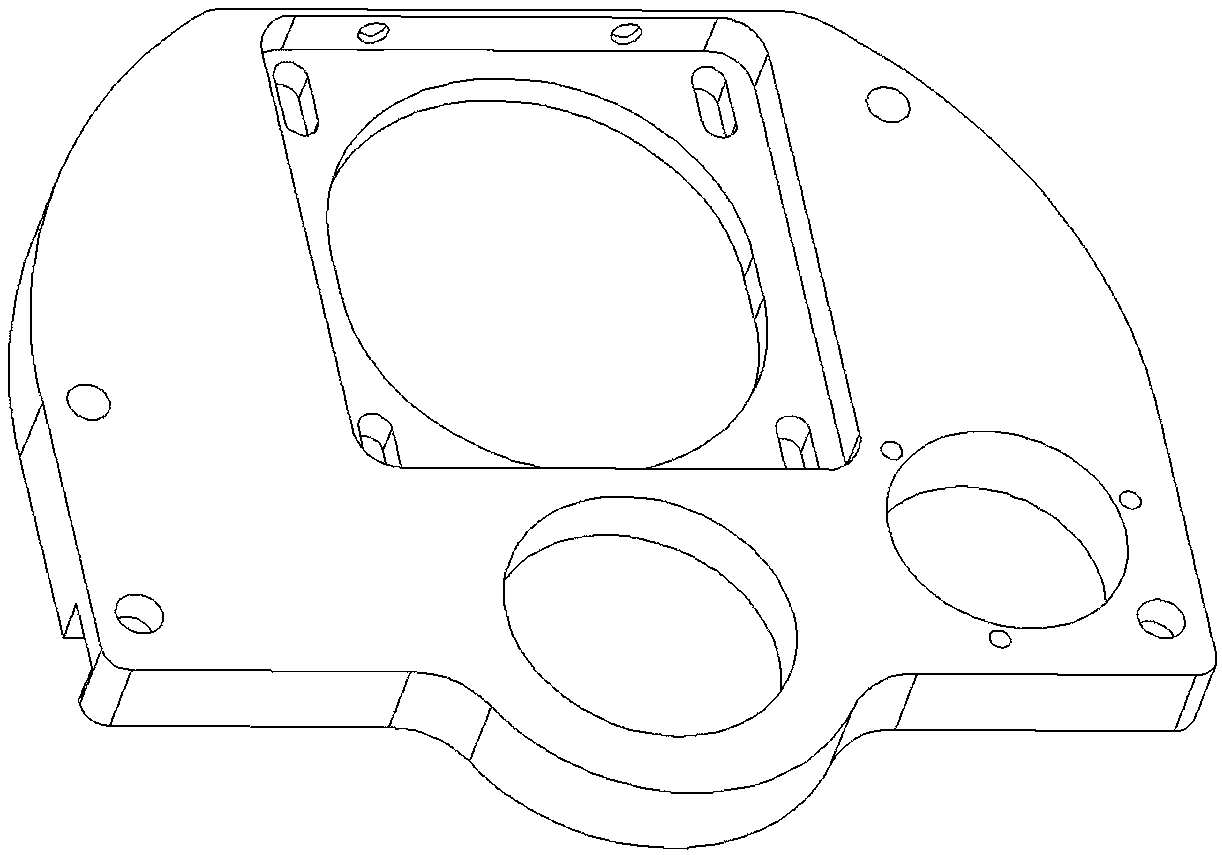
[0026] A metal bracket 4 is fixed on the inner upper part of the housing, and the metal bracket can be fixedly connected with the housing by screws. The metal bracket 4 is respectively provided with a sleeve in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com