State machine control method and device and robot control system
A control method and control device technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve problems such as error-prone
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0024] According to an embodiment of the present invention, an embodiment of a state machine control method is provided. It should be noted that the steps shown in the flowcharts of the accompanying drawings can be executed in a computer system such as a set of computer-executable instructions, and, although A logical order is shown in the flowcharts, but in some cases the steps shown or described may be performed in an order different from that shown or described herein.
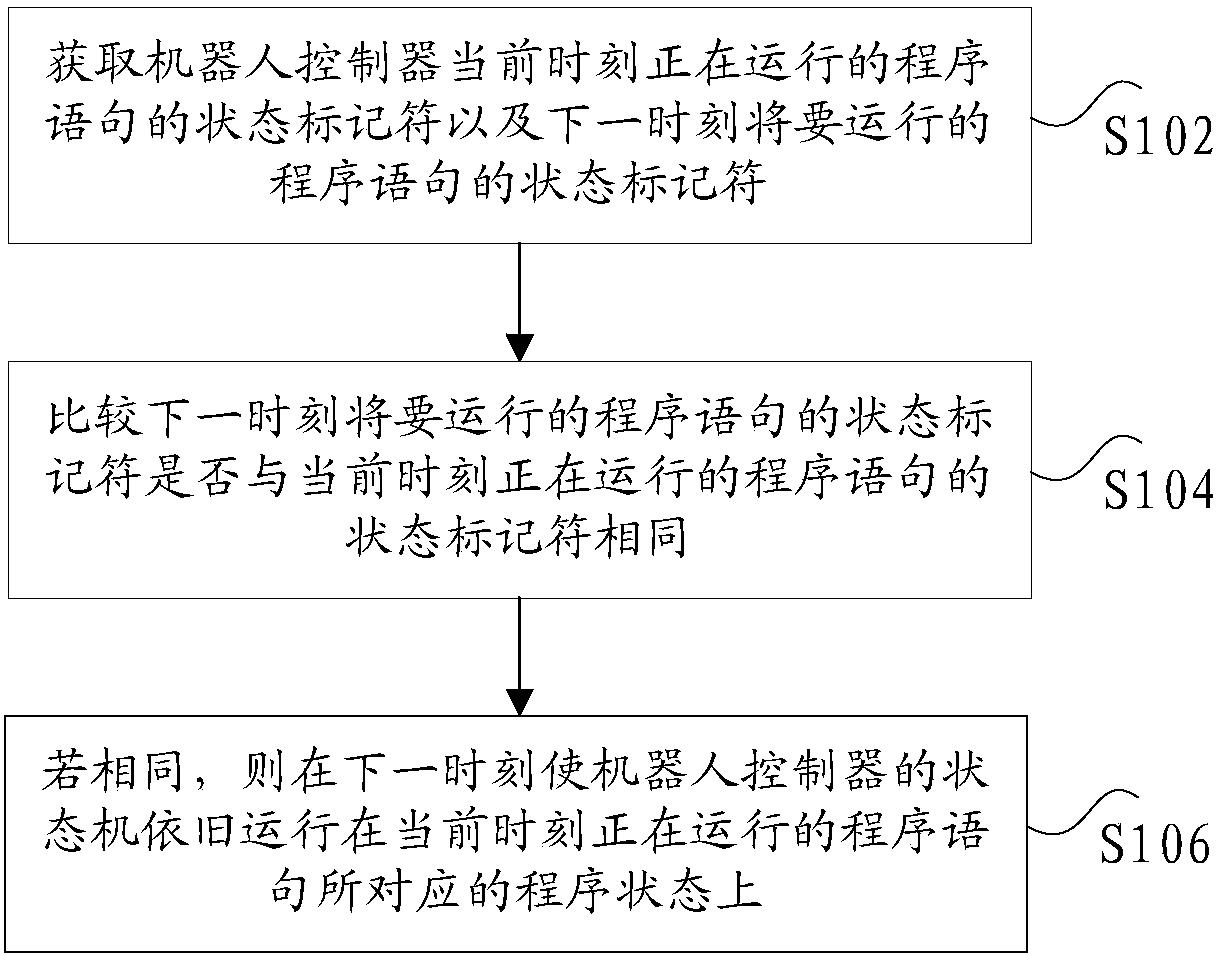
[0025] figure 1 is a flow chart of an optional state machine control method according to an embodiment of the present invention, such as figure 1 As shown, a state machine control method is provided for controlling a robot. It is characterized in that the state machine includes a plurality of program states, each program state corresponds to a group of program statements, and the program statement groups of different program states have different states Marker, wherein, the state machine control method com...
Embodiment 2
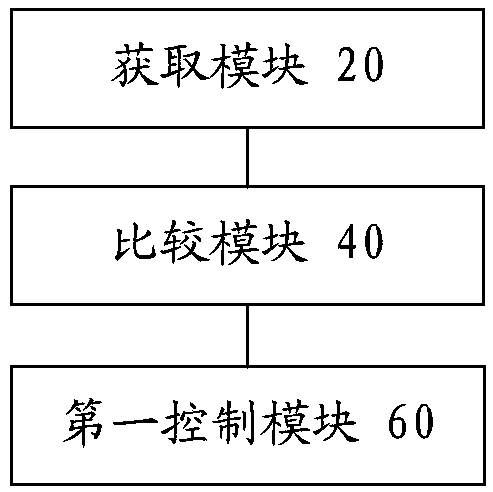
[0037] According to another aspect of the embodiments of the present invention, there is also provided a state machine control device for controlling a robot. The state machine includes a plurality of program states, each program state corresponds to a group of program statements, and the program statement groups of different program states have different status flags, where, image 3 is a schematic diagram of an optional state machine control device according to an embodiment of the present invention, such as image 3 As shown, the state machine control device includes: an acquisition module 20, which is used to acquire the status marker of the program statement that the robot controller is currently running and the status marker of the program statement that will be run at the next moment; a comparison module 40, used for Compare whether the status marker of the program statement to be run at the next moment is identical with the status marker of the program statement being ...
Embodiment 3
[0045] According to another aspect of the embodiments of the present invention, there is also provided a robot control system, including: a robot; and a state machine control device, configured to control the robot. It should be noted that the state machine control device in Embodiment 3 may be the state machine control device described in any implementation manner in Embodiment 2, which will not be repeated here.
[0046] The serial numbers of the above embodiments of the present invention are for description only, and do not represent the advantages and disadvantages of the embodiments.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com