Variable configuration biomimetic quadruped robot
A quadruped robot and robot body technology, applied in the fields of mechanism, bionics, and robotics, can solve problems such as poor movement flexibility, large support area, and low load capacity, and achieve improved motion stability, strong environmental adaptability, Reduce the effect of exercise shock
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0038] The present invention will be described in further detail below in conjunction with the accompanying drawings.
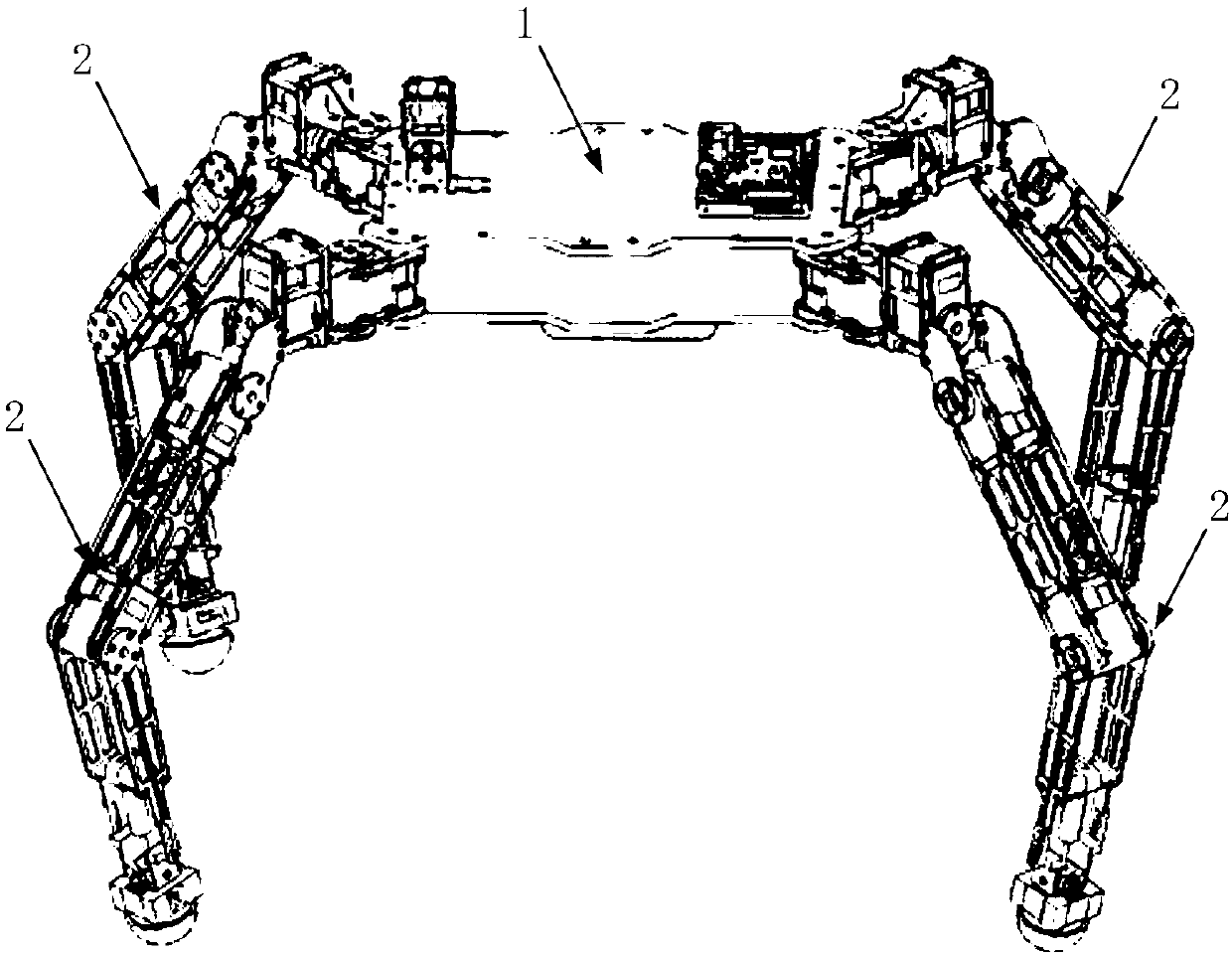
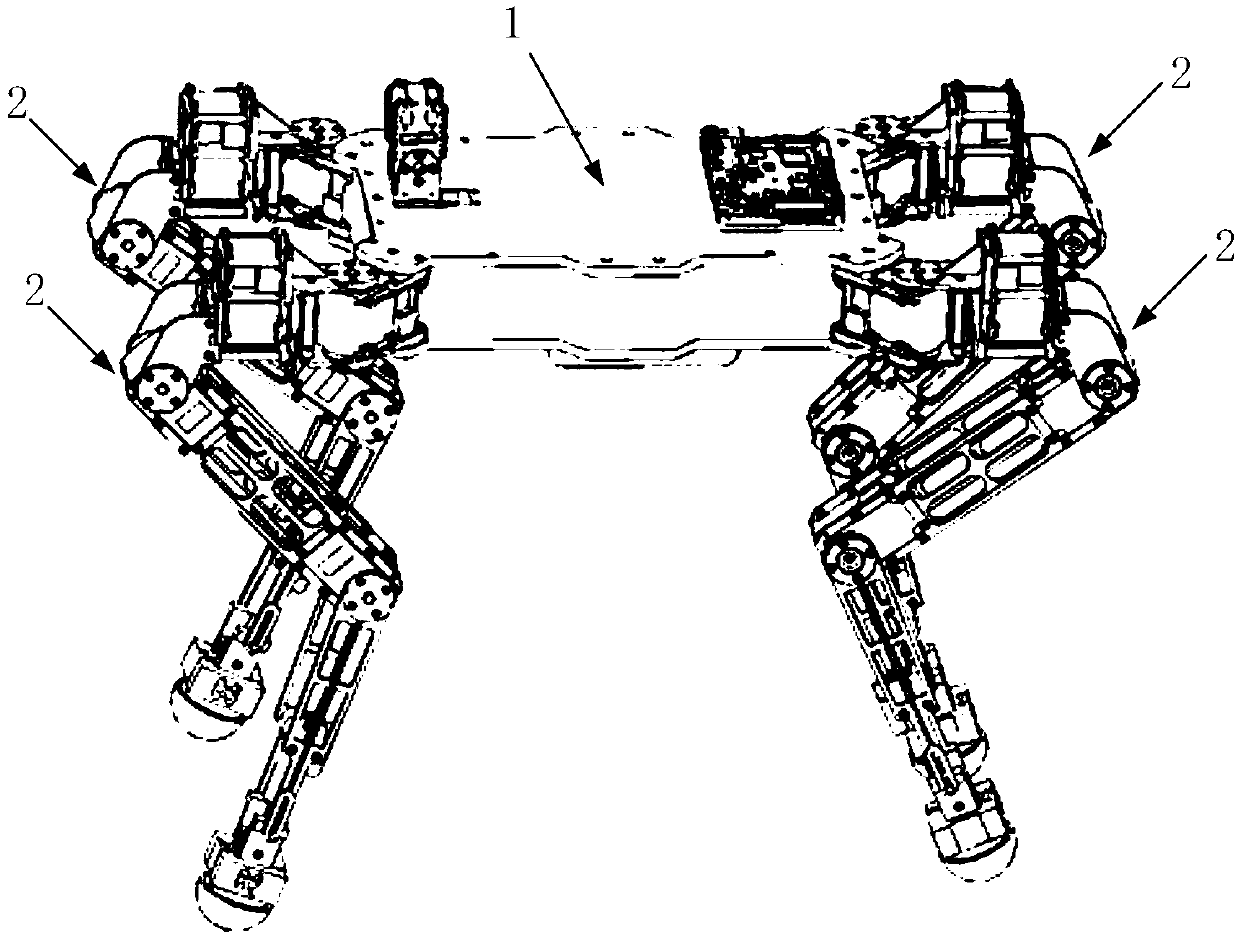
[0039] The physical mechanical structure of the variable configuration bionic quadruped robot of the present invention includes a robot body 1 and four variable configuration single-leg structures 2, such as figure 1 shown. At the same time, build its control system and sensor system on the basis of physical and mechanical structure, and configure power components.
[0040] The robot body 1 includes a body lower plate 101, a body upper plate 102 and a baffle plate 103, such as Figure 4 shown. Wherein, the body upper plate 101 and the body lower plate 102 are rectangular plates of equal size, symmetrically arranged up and down, and baffles 103 are installed between the four circumferential sides to realize the fixing between the body lower plate 101 and the body upper plate 102, and Between the body lower plate 101 and the body upper plate 102 , 6 uprights...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com