A Mobile Robot Positioning Method Based on Number and Alphabet Recognition
A technology of mobile robots and digital letters, applied in navigation computing tools, ground navigation, etc., to achieve flexible deployment, wide application, and easy reading
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0024] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
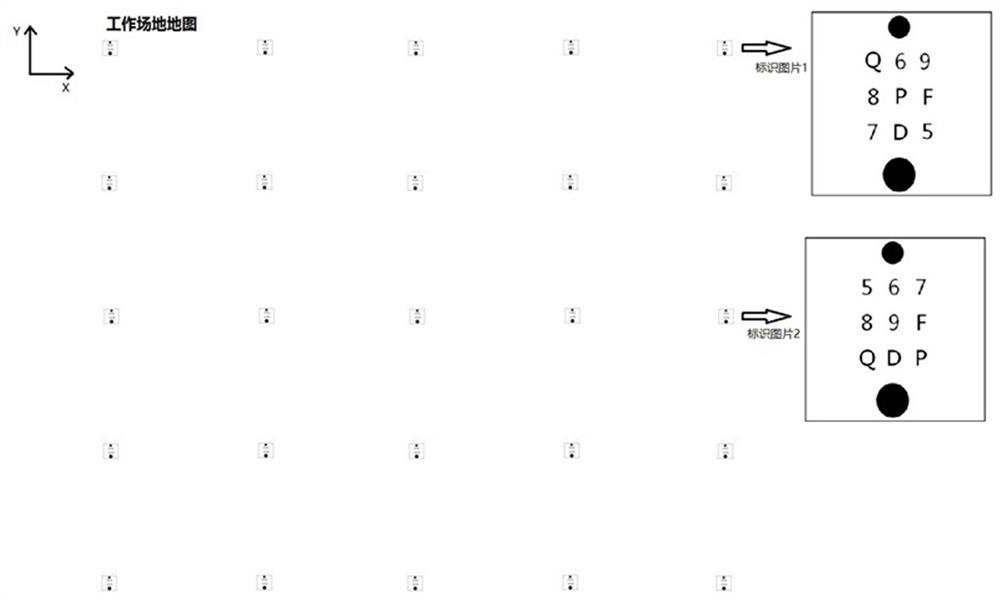
[0025] In the method of the present invention, the working area is set in the world coordinate system, and the robot is positioned by setting a picture containing numbers and letters and optical marking points on the ground of the working area as a ground mark, and then the robot is further planned according to the current position route. That is to paste multiple logo pictures on the ground of the work area, each logo picture contains the position information and direction information of the logo picture in the world coordinate system, and the logo is laid out on the ground to form a grid grid, and the mobile robot runs in the warehouse At the same time, the ground mark is read by the camera installed on the mobile robot, and transmitted to the control system through the wireless network, so as to obtain the current position, and pla...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com