Master-slave heterogeneous robot universal control method and system based on master-slave space mapping
A space mapping and control system technology, applied in the general control system, control/regulation system, program control, etc., can solve the problems that the robot cannot work well and cannot achieve the effect of the robot, and achieve strong versatility and safety. The effect of master-slave control security
Active Publication Date: 2018-02-23
XI AN JIAOTONG UNIV
View PDF6 Cites 19 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
According to the survey, the existing master-slave heterogeneous control methods are usually only suitable for a certain type of master-slave robot
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
 Login to View More
Login to View More PUM
 Login to View More
Login to View More Abstract
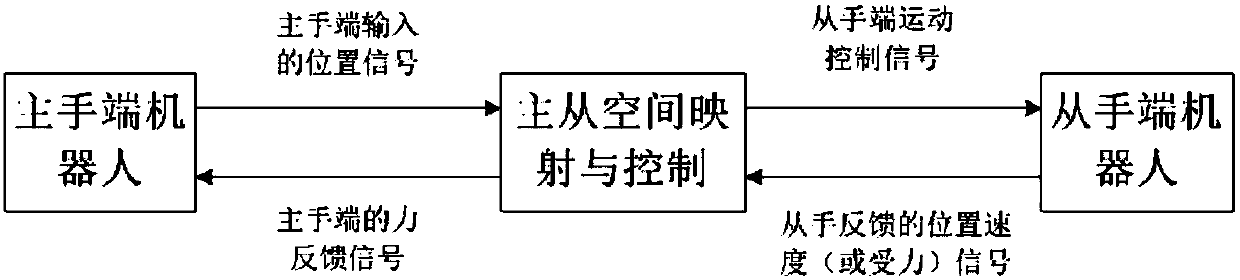
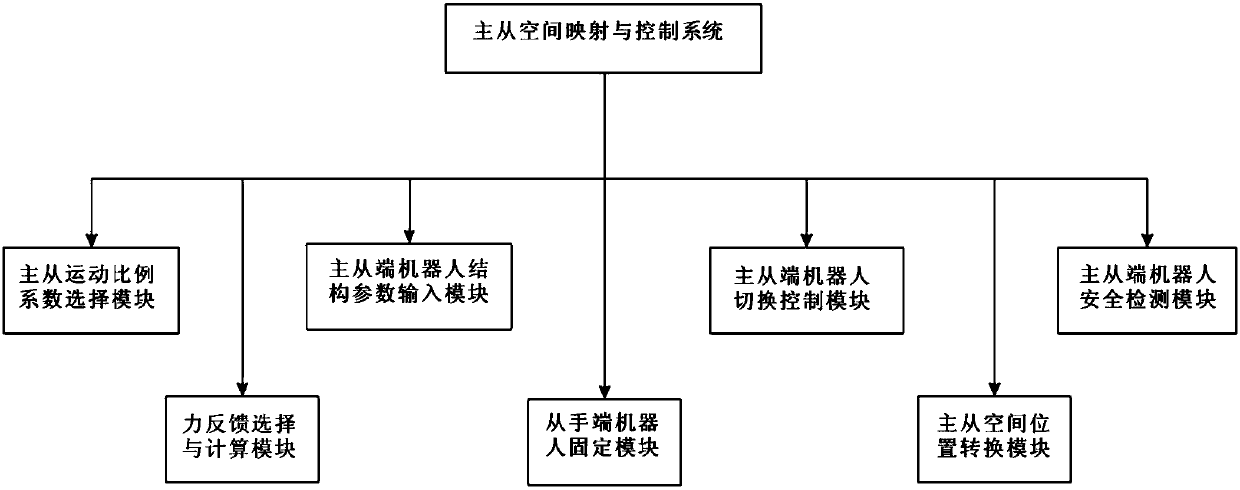
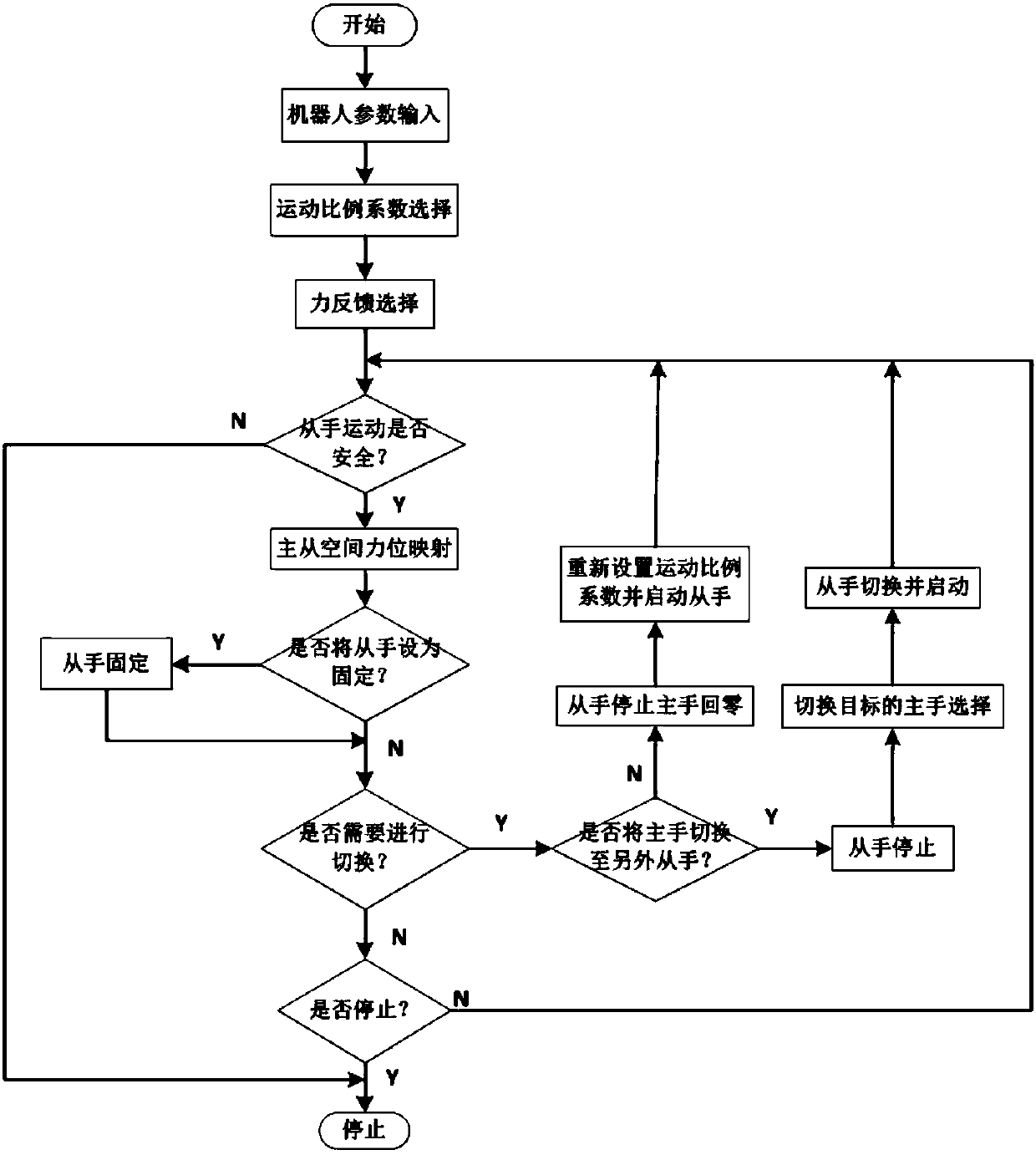
The invention discloses a master-slave heterogeneous robot universal control method and system based on master-slave space mapping. After an operator inputs connecting rod parameters of a master manipulator and a slave manipulator to the control system, the control system conducts mapping and conversion on the position, the speed and force of the master manipulator and the slave manipulator through the D-H parameter method and the Jacobian matrix method, and accordingly accurate control over the slave manipulator from the master manipulator is achieved. By means of the master-slave heterogeneous robot universal control method and system based on master-slave space mapping, mapping control over the master manipulator with any freedom degree and the slave manipulator with any freedom degreecan be achieved, accurate position and speed control over a robot at any slave manipulator end from any master manipulator end, accurate force feedback to the master manipulator from the slave manipulator is achieved, safety monitoring can be conducted on the system in real time, and very high universality and safety are achieved.
Description
technical field [0001] The invention belongs to the field of remote operation robots, and relates to a general master-slave space mapping and control method for a master-slave heterogeneous robot. Background technique [0002] With the continuous development of various technologies, robots have gradually entered various fields of production and life. For example, in the production lines of many industrial sites, only the program needs to be adjusted, and the robot can automatically complete the production tasks. However, in many industrial control sites, chemical plants, nuclear plants, etc., due to the complex environment of the plant and the high risk, manual methods cannot be used in consideration of the safety of workers, and it is difficult to To realize the complete automation of the production process, the combination of the two produces a master-slave teleoperation robot. In addition, the minimally invasive surgical robot in the medical field also adopts the remote ...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More IPC IPC(8): B25J9/16
CPCB25J9/1689G05B2219/40195
Inventor 要义勇周中山胡宇涛于仲海周兵
Owner XI AN JIAOTONG UNIV
Features
- Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
Why Patsnap Eureka
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Social media
Patsnap Eureka Blog
Learn More Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com