Maglev train system control method based on integral sliding mode control of improved double power reaching law
A technology of maglev trains and integral sliding mode, which is applied in the general control system, control/regulation system, adaptive control, etc., and can solve the problems of weakening system chattering, existence, and system overshoot
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
[0112] 1. The present invention proposes an improved DPRL-I-SMC, which is specifically described as follows:
[0113] 1. Control design
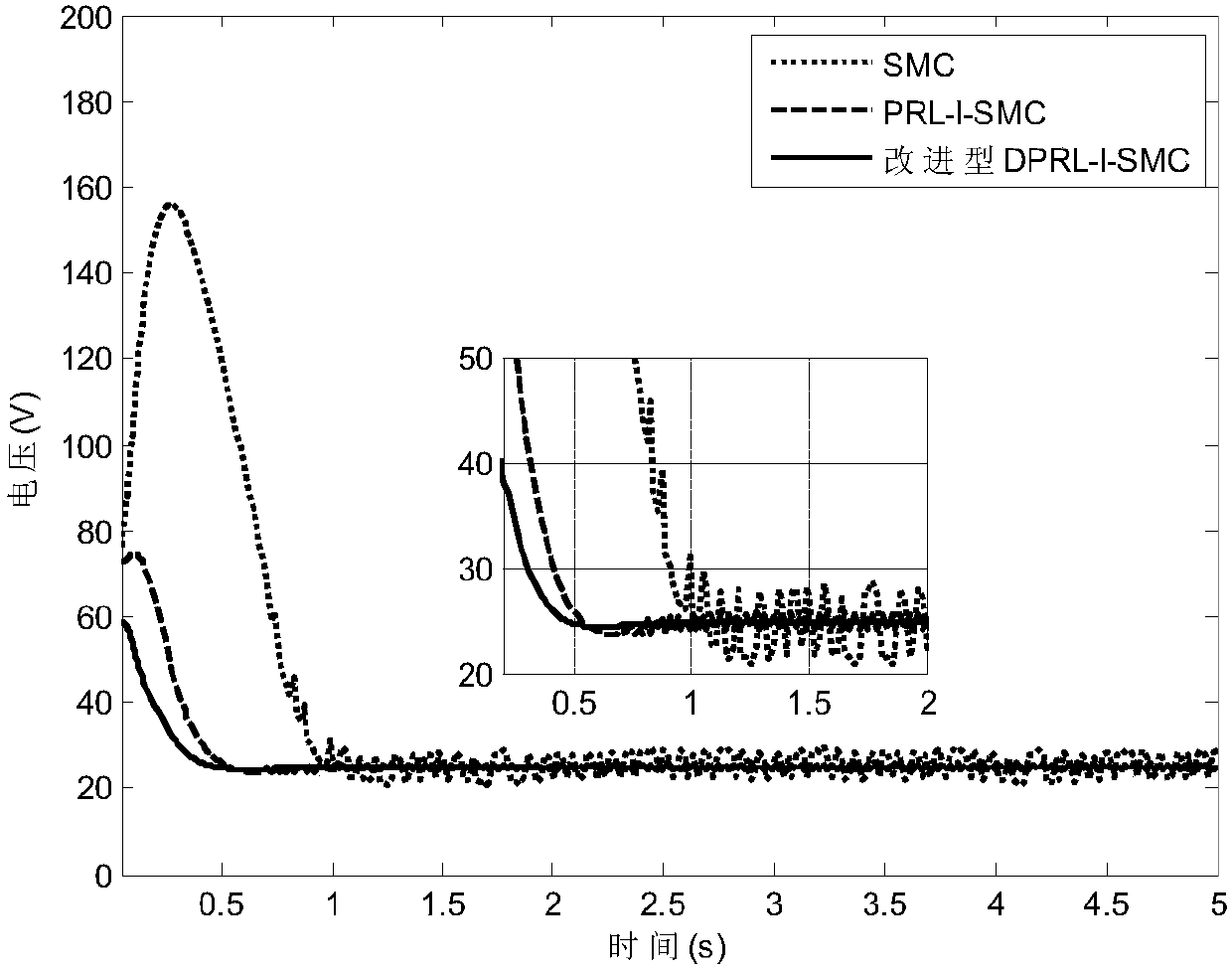
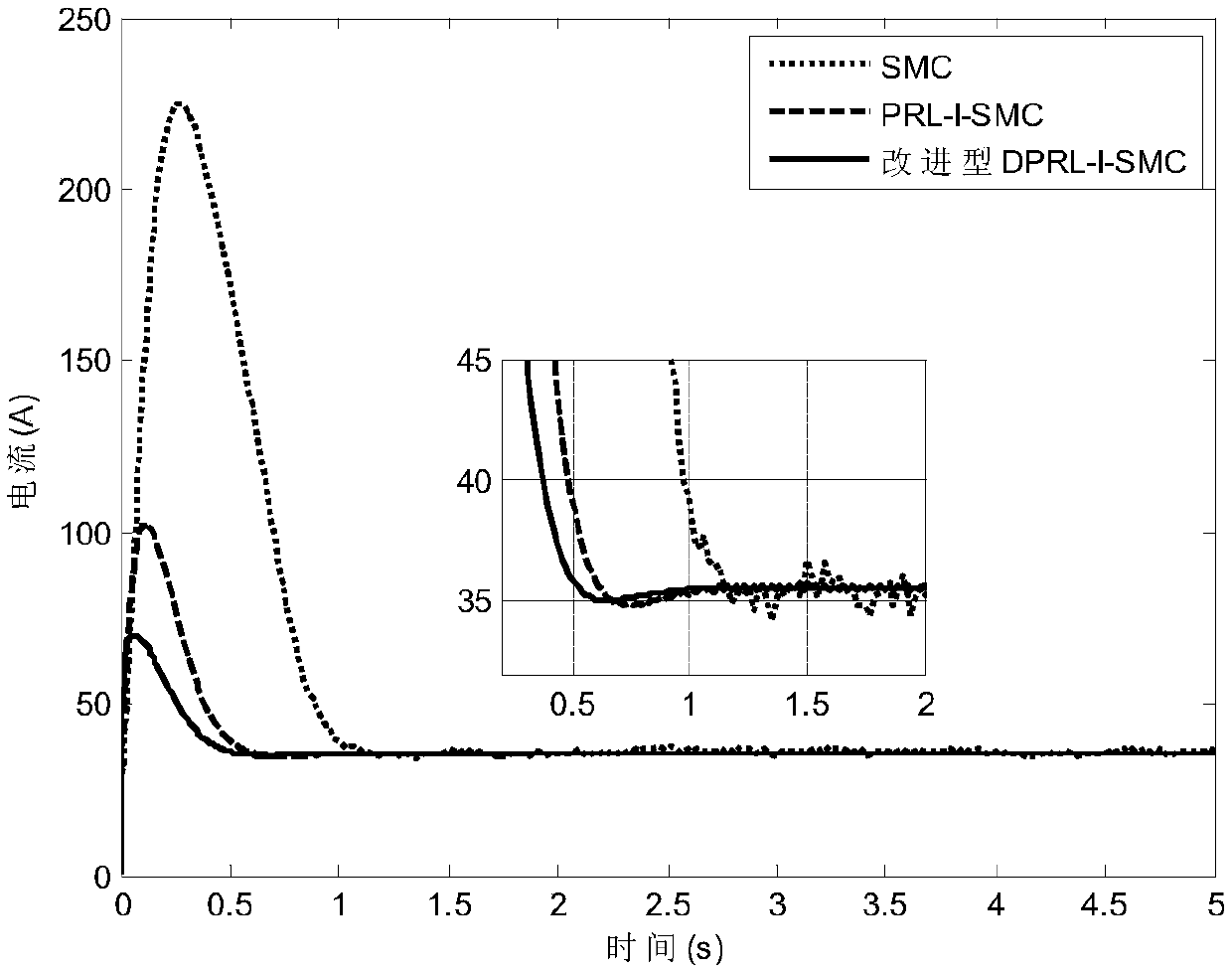
[0114] Considering the shortcomings of the existing traditional SMC and PRL-I-SMC methods such as slow convergence speed and large disturbance, an improved double power reaching law integral sliding mode control (DPRL-I-SMC) method is proposed, which can Further effectively weaken the disturbance problem in the PRL-I-SMC, reduce the overshoot, and improve the dynamic characteristics.
[0115] According to the PRL-I-SMC method, the DPRL-I-SMC sliding surface can be designed as
[0116]
[0117] Among them, c 1 ,c 2 ,c 3 are constants, and c 1 >0,c 2 >0,c 3 >0.
[0118] The exponential reaching law is
[0119]
[0120] Among them, η 1 ,k 1 is a constant, is an exponential approach term, and its solution is
[0121] The double power reaching law is
[0122]
[0123] Combining formulas (32) and (33), the reaching law of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com