Routing inspection obstacle avoiding device for unmanned plane
A technology for unmanned aerial vehicles and obstacle avoidance, which is applied in three-dimensional position/channel control and other directions, and can solve problems such as potential safety hazards and inability to avoid unknown obstacles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
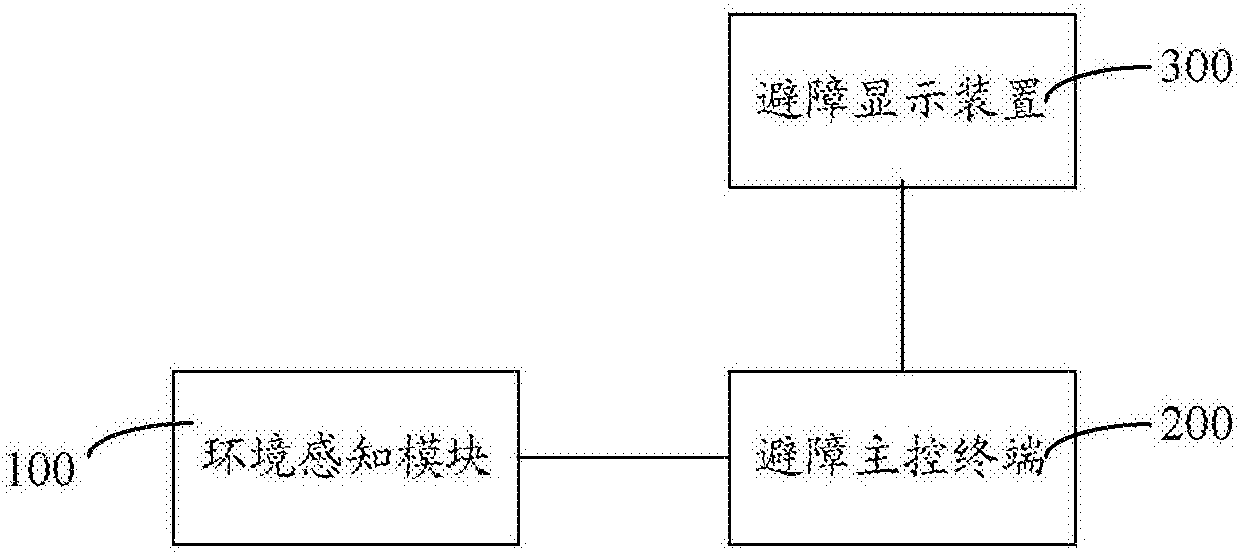
[0018] Such as figure 1 As shown, a power transmission line unmanned aerial vehicle inspection and obstacle avoidance system includes an interconnected environment perception module 100 and an obstacle avoidance master control terminal 200;
[0019] The environmental perception module 100 acquires the environmental information data around the drone in real time, and sends the environmental information data to the obstacle avoidance main control terminal 200, and the obstacle avoidance main control terminal 200 performs fusion processing on the environmental information data, and performs a process based on the fusion processed data. The SLAM operation updates the UAV trajectory planning according to the SLAM operation result and the preset UAV trajectory planning, wherein the environmental information data includes obstacle position information data.
[0020] The environmental perception module 100 is used for real-time acquisition of environmental information data around the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com