Flexible Mounting Mechanism for the End of Robotic Arm in Craniotomy
A technology of surgical robot and installation mechanism, which is applied in the field of medical equipment, can solve the problems of time-consuming, time-consuming, and physical exertion of doctors, and achieve the effects of improving stability, avoiding sudden changes in load force, and ensuring safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be described in detail below with reference to the accompanying drawings and examples.
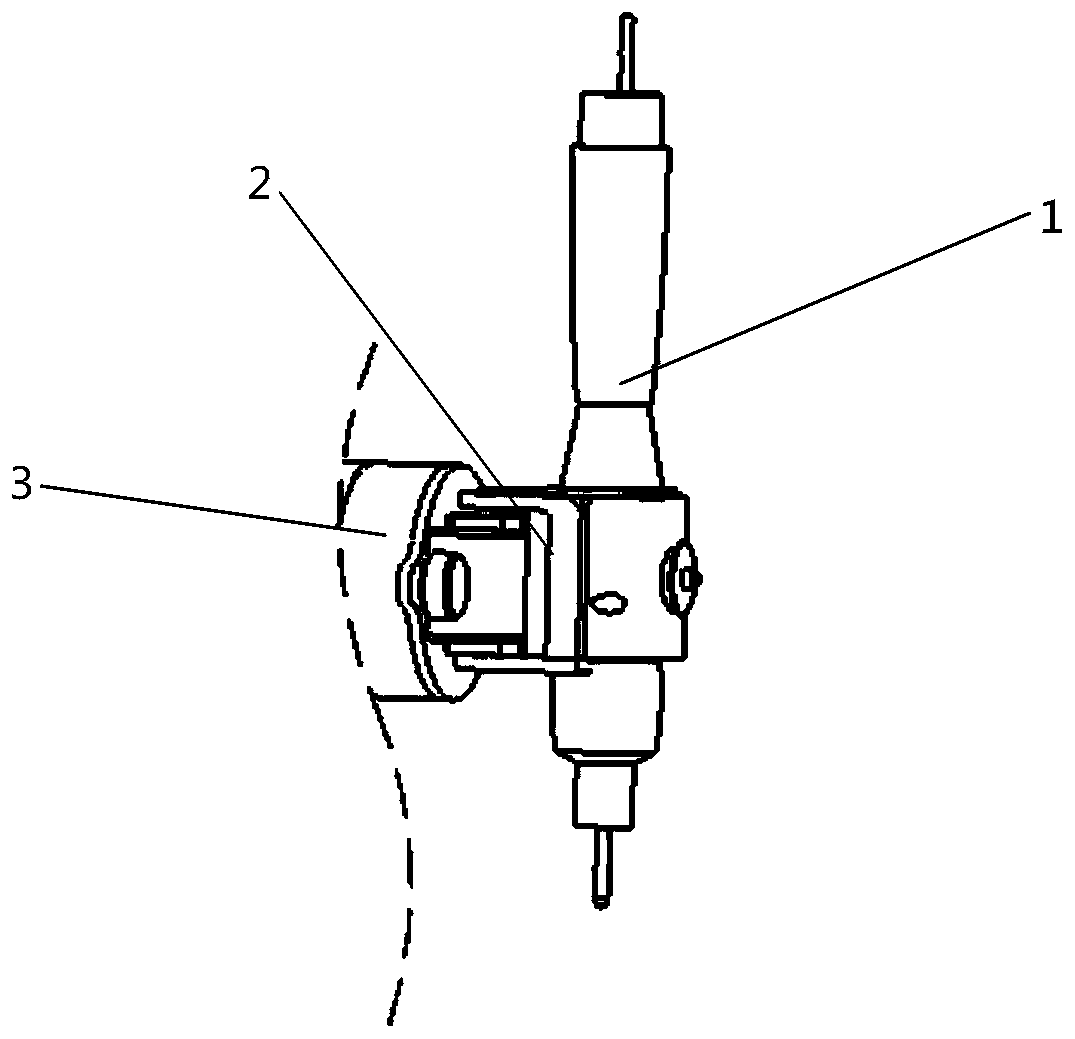
[0023] as attached figure 1 As shown, the flexible installation mechanism for the end of the craniotomy robot arm provided by the present invention is used to connect the cranium milling 1 and the flange 3 at the end of the manipulator, and the cranium milling 1 is driven by the robotic arm of the robot to realize the craniotomy. operate. The flexible installation mechanism includes cranial milling fixed components, terminal fixed components and springs 13;
[0024] The cranial milling fixed connection component is used for fixed connection cranial milling;
[0025] The end fixing component is used for fixed connection with the end flange of the mechanical arm;
[0026] The spring 13 forms an elastic connection between the cranimilling fixed component and the end fixed component. When the craniomill maintains contact force with the bottom of the skull, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com