A Method for Suppressing Vehicle Shadow Interference in Open-air Expressway Scenes Based on Feature Fusion
A highway and feature fusion technology, applied in the field of image processing, can solve problems such as lack of solutions, noise interference, and lack of targeted solutions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
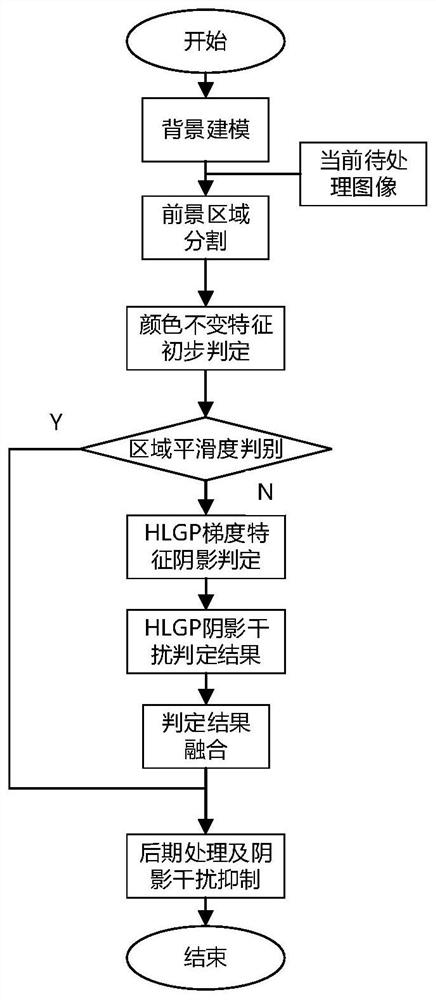
[0066] As shown in the figure, this embodiment provides a method for suppressing vehicle shadow interference in an open-air highway scene based on feature fusion, which can overcome the noise existing in the actual engineering application environment and realize accurate extraction of vehicle target areas. Aiming at the problem of scene noise interference, a shadow suppression method that combines color grayscale features and local gradient pattern direction histogram (Histogram of Local Gradient Patterns, HLGP) features is proposed.
[0067] First, the chroma and brightness similarity are used to preliminarily determine the shadow; then, for the local area with rich texture information, the local gradient pattern (Local Gradient Patterns, LGP) feature with noise robustness is used to extract the local texture, and the local gradient histogram is fused Consists of HLGP features. On this basis, the result of color shadow discrimination is corrected to reduce its false detection...
Embodiment 2
[0073] Step 1. Preliminary identification of shaded areas based on grayscale color features; for chromaticity and brightness characteristics, HSV space can decouple the coupling relationship between the two in RGB space. Therefore, the image in RGB space can be converted to HSV space for detection by means of color space conversion.
[0074] The shadow feature can be used to judge the color consistency from the brightness and chroma according to the following formula:
[0075]
[0076] Among them, c represents the color components in the current frame, here represent the components of the H channel and the S channel respectively, Ω 1 (x,y) is the neighborhood space of pixel I(x,y). In order to reduce the interference of noise, the color consistency of the local area of the target pixel is used for discrimination. Therefore, the color consistency of the pixel in the local area can be obtained by the following formula:
[0077]
[0078] It can be seen from the above fo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com