Automatic guided vehicle dual-lidar control method and system and positioning method
A lidar, automatic guidance technology, applied in the control/regulation system, vehicle position/route/altitude control, non-electric variable control and other directions, can solve the problem of loss, the positioning algorithm cannot obtain enough effective information, etc., to improve the intelligence The effect of intelligentization, reducing blindness time, and positioning intelligence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
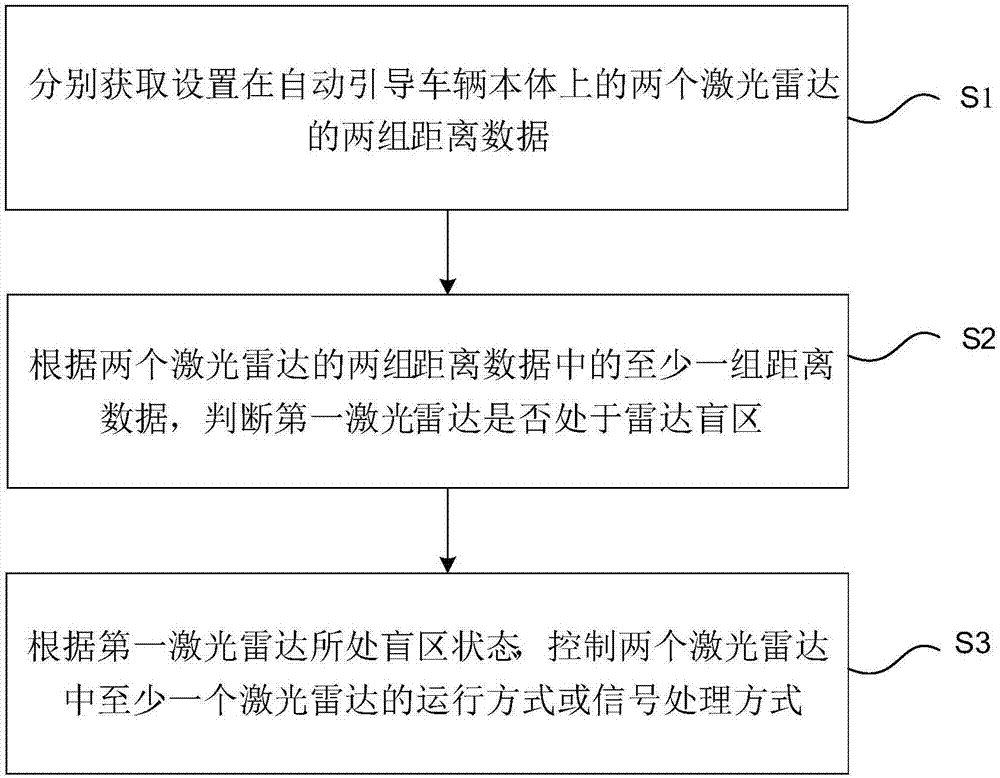
[0056] First, see figure 1 , a method for controlling dual laser radars on an automatic guided vehicle provided in Embodiment 1, including:
[0057] Step S1, respectively acquire two sets of distance data of the two laser radars set on the automatic guided vehicle body; the two laser radars include the first laser radar and the second laser radar, and the two sets of distance data include the first set of distance data and the second set of distance data Two sets of distance data, the first laser radar corresponds to the first set of distance data, and the second laser radar corresponds to the second set of distance data;
[0058] Step S2, according to at least one set of distance data in the two sets of distance data of the two laser radars, it is judged whether the first laser radar is in a radar blind spot;
[0059] Step S3, according to the blind spot state of the first laser radar, control the operation mode or signal processing mode of at least one of the two laser rada...
Embodiment 2
[0094] As a preferred embodiment of the present invention, to determine whether the first laser radar enters the blind spot, there are several following implementations:
[0095] The first one is to judge whether the automatic guided vehicle is in the radar blind spot through the external positioning system, specifically: according to the first set of distance data, the current position of the first laser radar is obtained;
[0096] The current position is matched with the predefined blind spot position, and when the current position matches the predefined blind spot position, it is determined that the first laser radar enters the radar blind spot.
[0097] Specifically, when the distance between the current position and the predefined blind spot is within a predetermined threshold range, it is judged that the first lidar has entered the blind spot.
[0098] The second is to judge whether the automatic guided vehicle is in the radar blind spot through the external visual senso...
Embodiment 3
[0103] As a preferred embodiment of the present invention, it further includes: reducing the speed of the automatic guided vehicle when the first laser radar is in a radar blind zone.
[0104] Specifically, when the controller detects that it enters the radar blind zone, it controls the transmission of the vehicle to reduce the driving speed of the vehicle. As before, one scenario of entering the blind spot of the first lidar is that the vehicle is close to the cargo. At this time, reducing the speed of the vehicle will help reduce the probability of accidental collision between the vehicle and the cargo.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com