Robot gripper device for clamping special-shaped workpieces
A technology for robotic hands and special-shaped workpieces, which is applied in the direction of manipulators, chucks, manufacturing tools, etc., and can solve the problems of inability to grasp workpieces of different shapes, limited scope of application, poor adaptability of special-shaped workpieces, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The standard parts used in the present invention can be purchased from the market, and the special-shaped parts can be customized according to the instructions and the accompanying drawings. The specific connection methods of each part adopt mature bolts, rivets, welding in the prior art , pasting and other conventional means, no longer described in detail here.
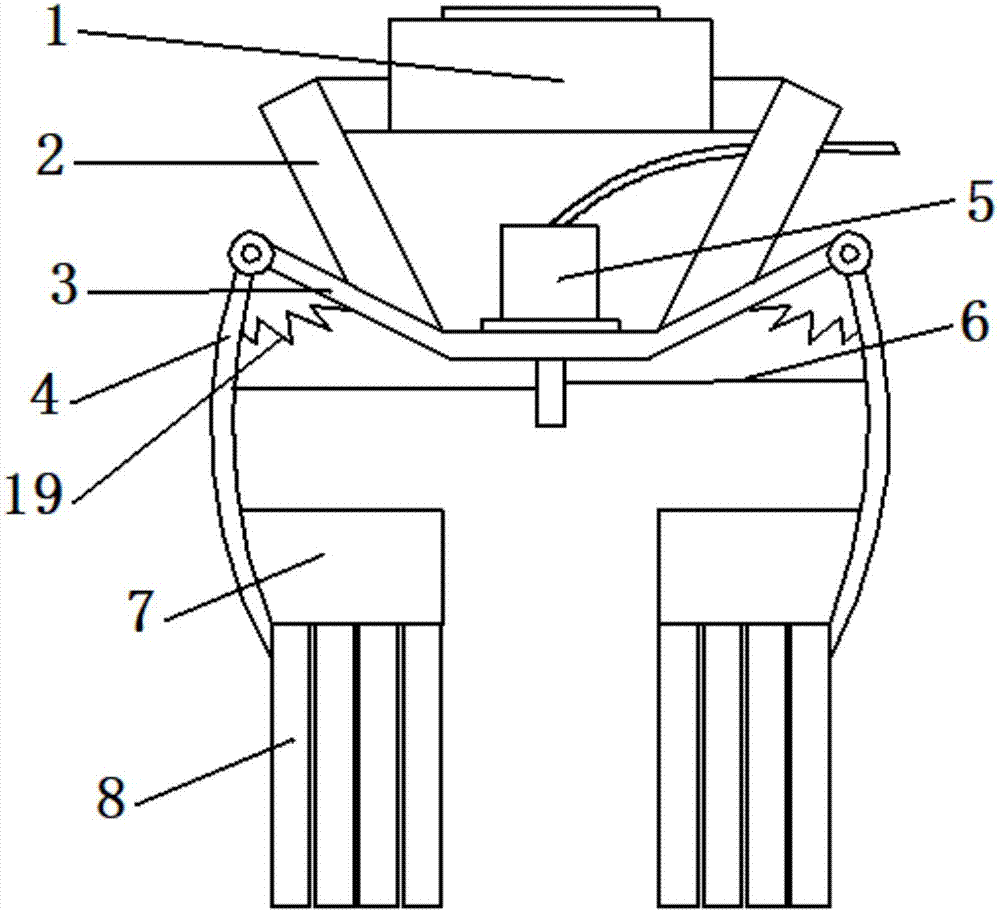
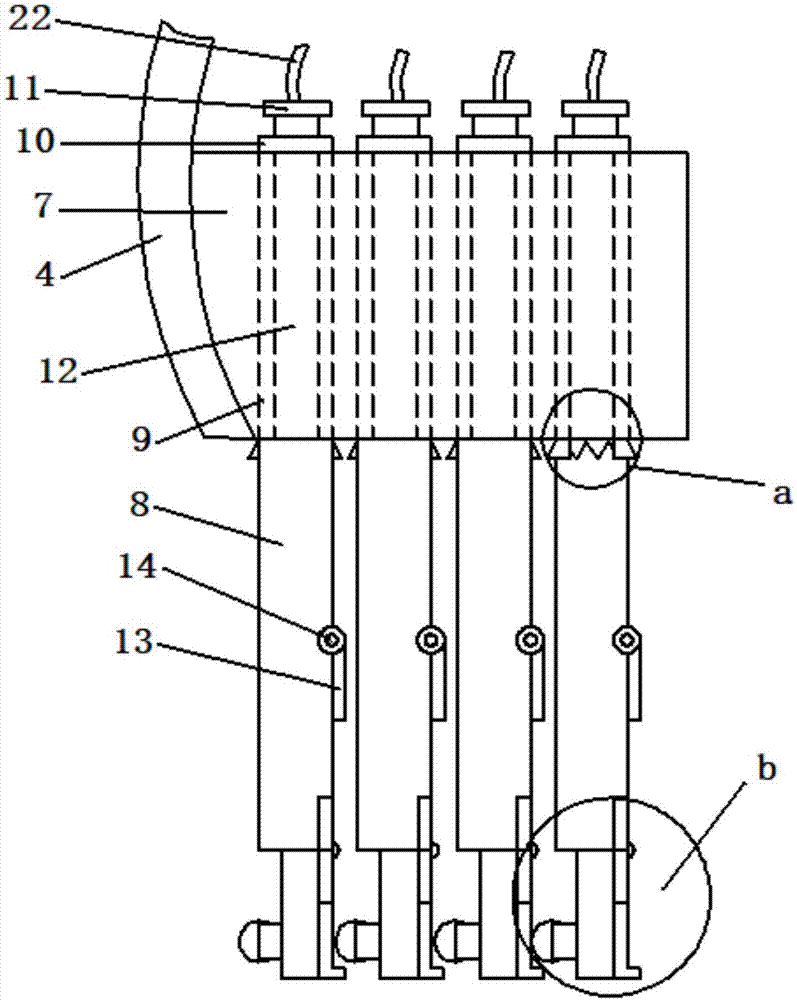
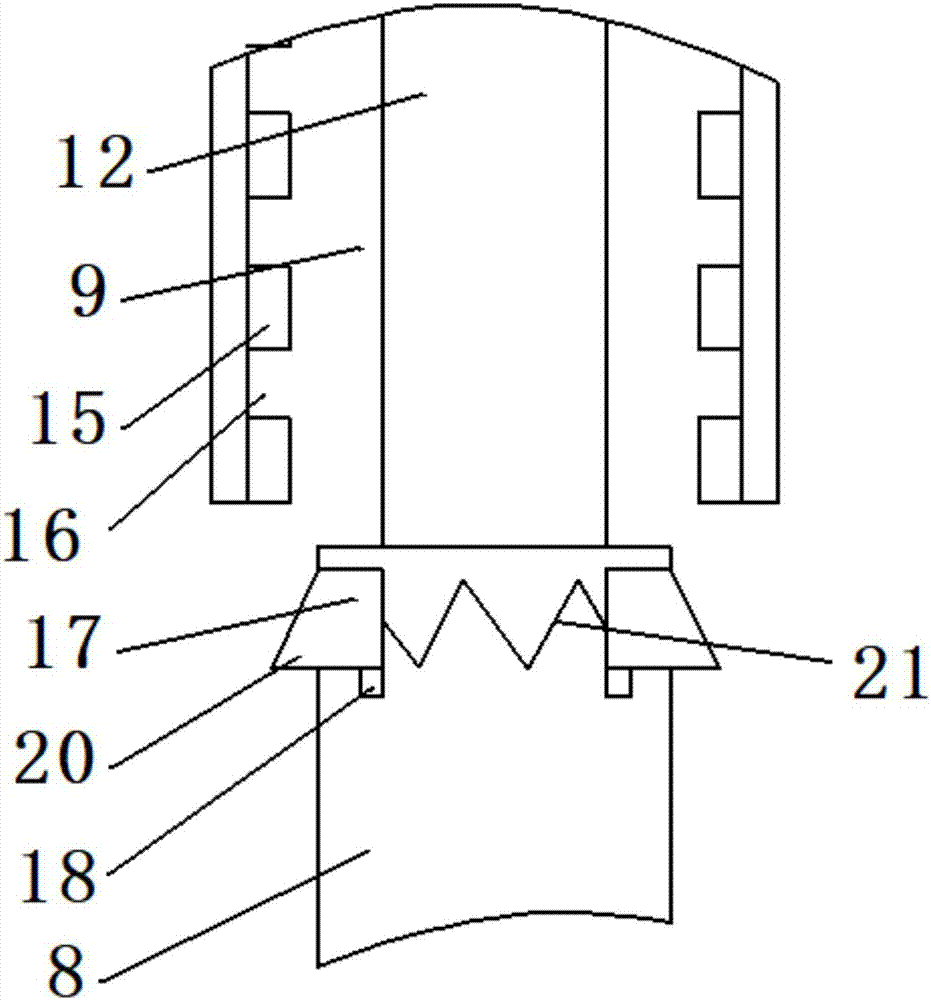
[0019] refer to Figure 1-5, a specific embodiment of the present invention includes a mounting base 1, the two ends of the mounting base 1 are connected with a second bracket 3 through two first brackets 2, and a third bracket is respectively hinged under the two ends of the second bracket 3 4. A first spring 19 is connected between the second bracket 3 and the third bracket 4, and a motor 5 is also fixedly connected to the second bracket 3. The motor 5 shaft is connected to the two third brackets 4 through two connecting ropes 6 respectively. , the lower inner side of the third bracket 4 is fixedly connecte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com