A signal processing method and device for an azimuth thruster rudder angle sensor
A technology of azimuth propeller and rudder angle sensor, which is applied in the direction of ship propulsion, propulsion parts, transportation and packaging, etc., can solve the problem of affecting ship navigation, the detection value of rudder angle is not evenly distributed, and the rudder angle of azimuth propeller cannot be solved. Adjust to the exact position, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
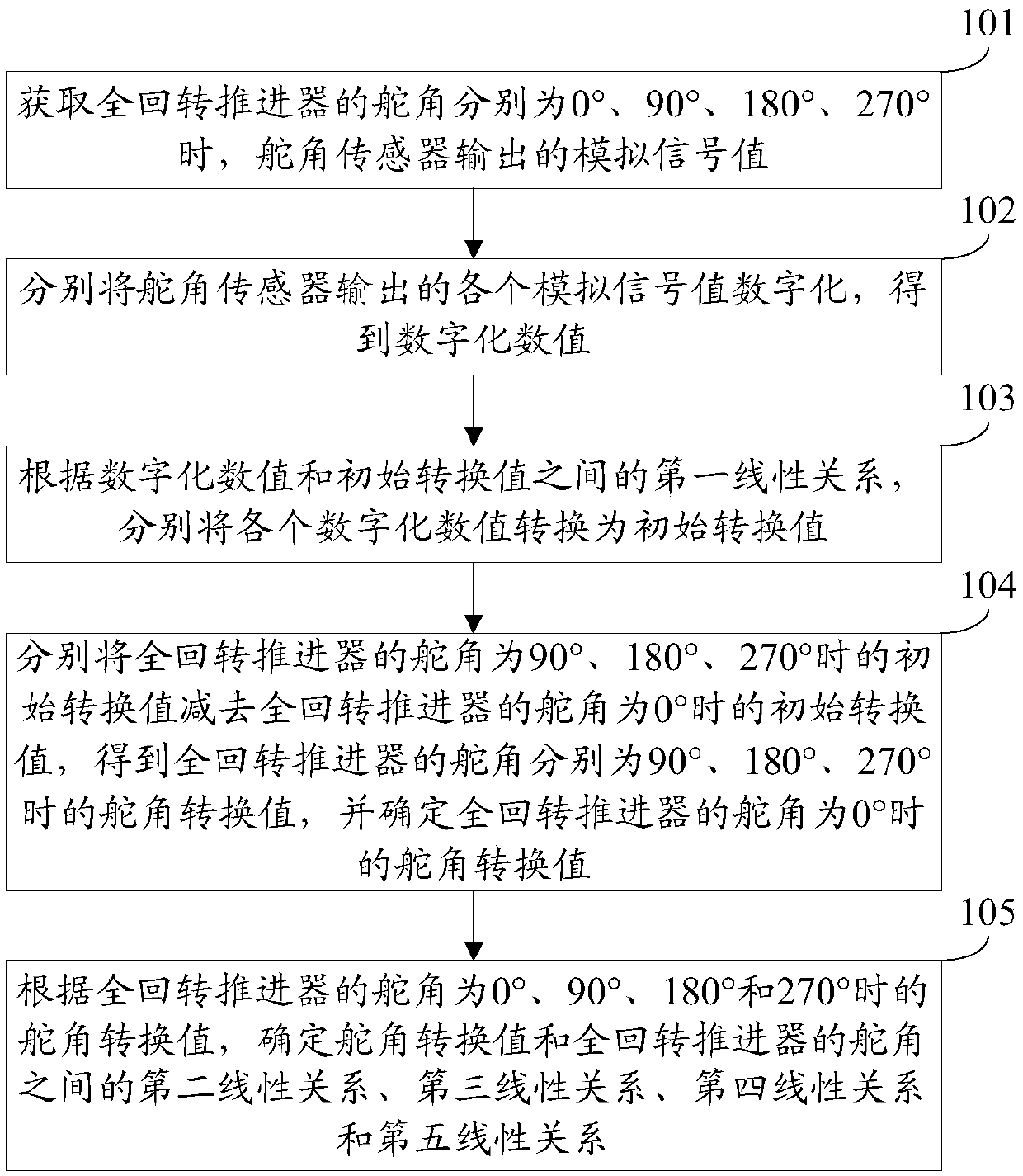
[0071] The embodiment of the present invention provides a method for processing the signal of the rudder angle sensor of the azimuth thruster, see figure 1 , the processing method includes:
[0072] Step 101: Obtain analog signal values output by the rudder angle sensor when the rudder angles of the azimuth propeller are 0°, 90°, 180°, and 270° respectively.
[0073] In this embodiment, the rudder angle sensor is a sensor for detecting the rudder angle of the azimuth thruster, which can be implemented specifically by using an angle sensor. The rudder angle sensor will output an analog signal of corresponding size when detecting the rudder angle of the azimuth propeller. The analog signal is theoretically a current signal of 4-20mA or a voltage signal of 0-10V. Due to the limitation of the detection range, the minimum value of the analog signal output by the rudder angle sensor may be greater than 4mA or 0V, and the maximum value may be less than 20mA or 10V.
[0074] In pr...
Embodiment 2
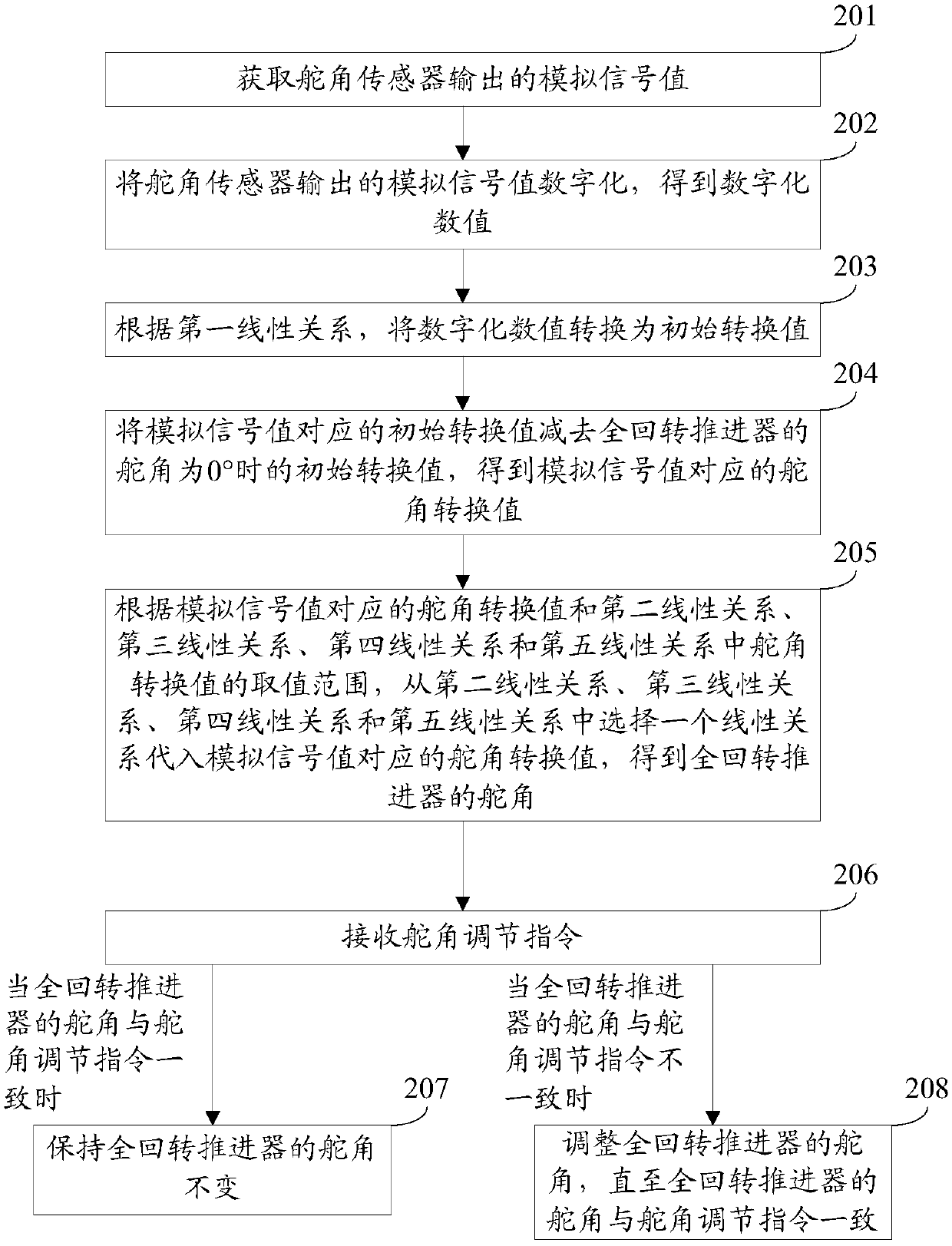
[0112] The embodiment of the present invention provides a method for processing the signal of the rudder angle sensor of the azimuth thruster, see figure 2 , the processing method includes:
[0113] Step 201: Obtain the analog signal value output by the rudder angle sensor.
[0114] Specifically, step 201 is similar to step 101 and will not be described in detail here.
[0115] Step 202: Digitize the analog signal value output by the rudder angle sensor to obtain a digitized value.
[0116] Specifically, step 202 is similar to step 102, and will not be described in detail here.
[0117] Step 203: Convert the digitized value into an initial converted value according to the first linear relationship between the digitized value and the initial converted value.
[0118] Specifically, step 203 is similar to step 103 and will not be described in detail here.
[0119] Step 204: Subtract the initial conversion value corresponding to the analog signal value from the initial conver...
Embodiment 3
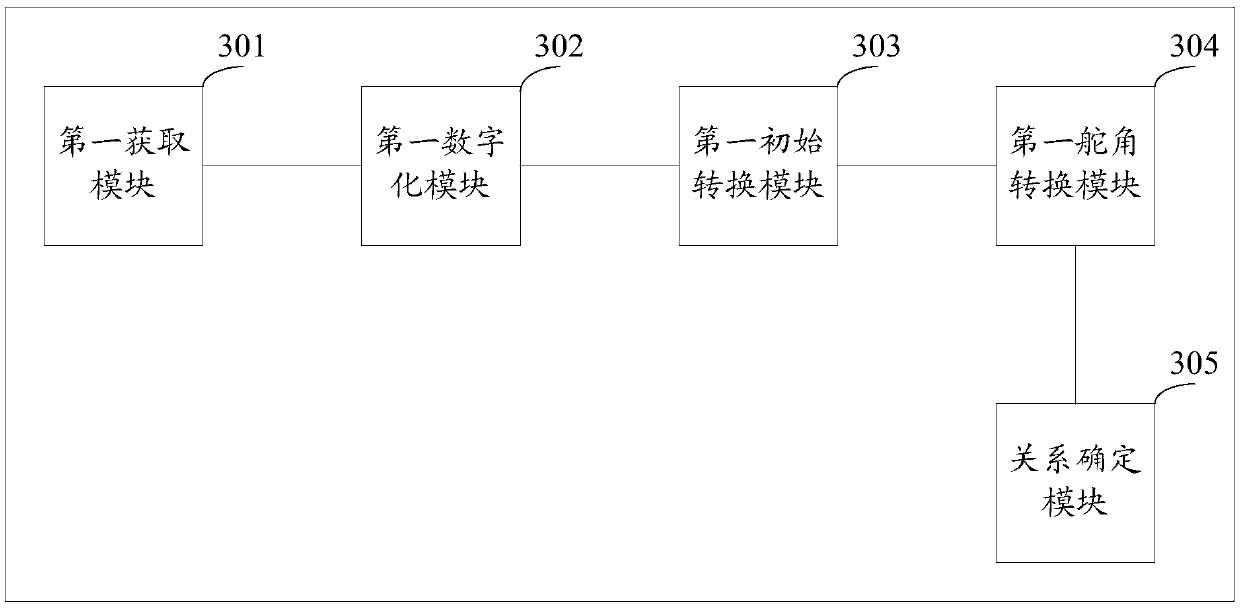
[0170] An embodiment of the present invention provides a signal processing device for the rudder angle sensor of an azimuth thruster, which is suitable for realizing the processing method provided in Embodiment 1, see image 3 , the processing unit includes:
[0171] The first acquisition module 301 is used to acquire the analog signal values output by the rudder angle sensor when the rudder angles of the azimuth thrusters are 0°, 90°, 180°, and 270° respectively;
[0172] The first digitization module 302 is used to digitize each analog signal value output by the rudder angle sensor respectively to obtain a digitized value;
[0173] The first initial conversion module 303 is used to convert each digitized value into an initial conversion value according to the first linear relationship between the digitized value and the initial conversion value, and the value range of the digitized value in the first linear relationship is the rudder angle sensor The value range of the ou...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com