Multi-robot task allocation and path planning method
A task allocation and multi-robot technology, applied in the field of multi-robot path planning of immune genetic algorithm, can solve the problem of too large search space of genetic algorithm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0098] Specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
[0099] The invention is a multi-robot task assignment and path planning method. In a multi-robot system, tasks are first assigned to each robot according to a certain strategy, and then each robot performs path planning for the assigned tasks. Specifically include the following steps:
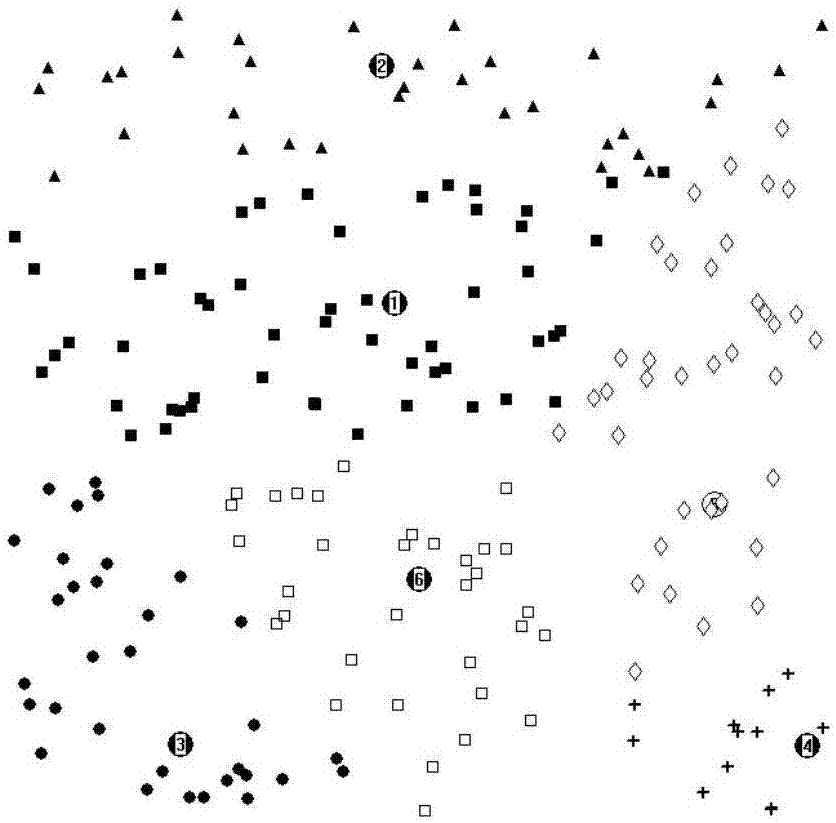
[0100] Step 1: Acquisition of robot data information, such as robot speed, power, maximum working time, maximum acceptable number of tasks, and the location of task points. as attached figure 2 As shown in the figure, the results of six randomly generated robots and data of 200 task points after task assignment are shown.
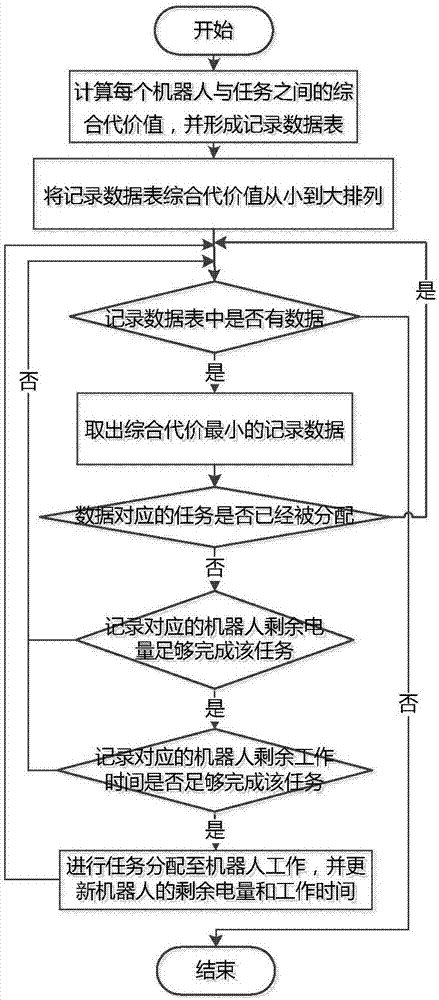
[0101] Step 2: Multi-robot task allocation: Calculate the comprehensive cost data between each robot and task, comprehensively consider factors such as robot power, working time, and the maximum number of tasks, and assign tasks to robots...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com