A flexible connector and robot foot structure using the connector
A technology of flexible connectors and robots, which is applied in the field of robots and can solve problems such as robots turning over
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
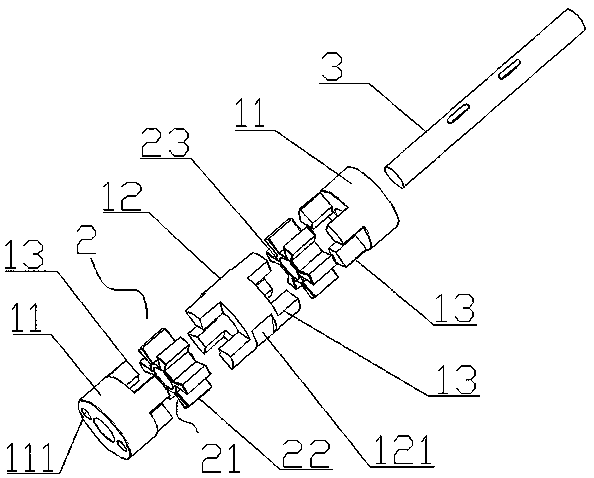
[0027] Such as figure 1 As shown, a flexible connector includes an intermediate shaft 3 and at least three rigid joints, a fixed joint 2 made of rubber is arranged between every two rigid joints, and the intermediate shaft 3 passes through the The rigid joint and the fixed joint 2 are keyed to the fixed joint 2; the fixed joint 2 includes a sleeve 23 and annular blades 22 evenly distributed outside the sleeve 23, and a connection space is formed between every two blades 22 21. The one end of the rigid joint in contact with the fixed joint 2 is evenly distributed with bosses 13 corresponding to the shape of the connection space 21, and the bosses 13 on two adjacent rigid joints are alternately inserted into the adjacent connection spaces 21 The rigid joint includes two end joints 11 and at least one intermediate joint 12, the end joint 11 is provided with a connection hole 111 away from the end of the boss 13, and the outer surface of the intermediate joint 12 is provided with ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com