Unmanned aerial vehicle (UAV) path correction method and system based on quasi-uniform spline curve
A spline curve, UAV technology, applied in the control/regulation system, vehicle position/route/height control, non-electric variable control and other directions, can solve the problem that the UAV cannot fly according to the path and the effect is reduced
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] In order to make the objectives, technical solutions and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention and are not intended to limit the invention.
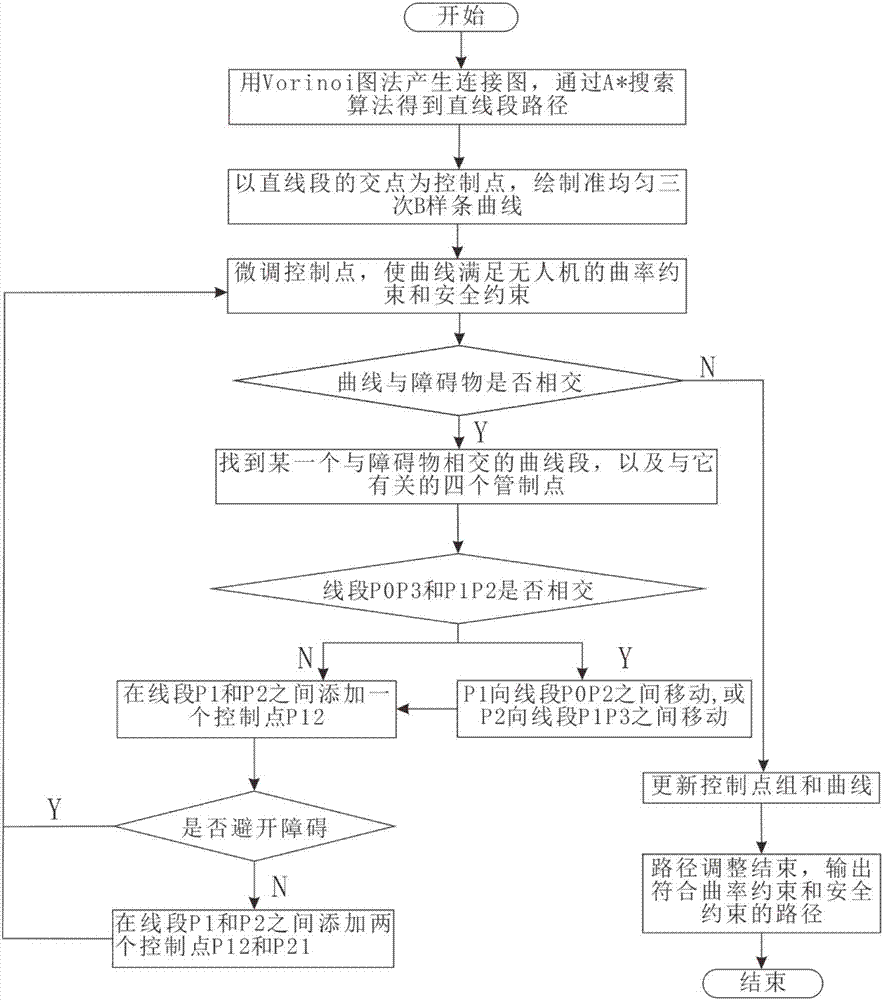
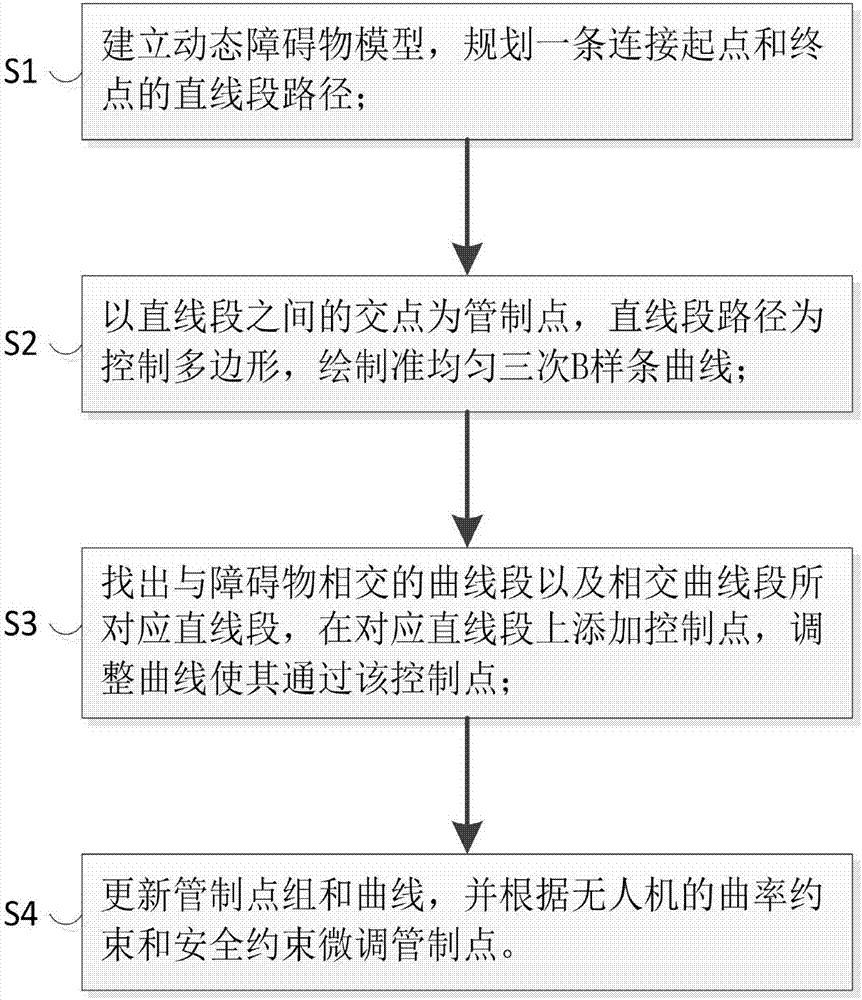
[0030] like figure 1 As shown, the embodiment of the present invention provides a UAV path correction method based on a quasi-uniform spline curve, such as figure 2 As shown, the described UAV path correction method based on quasi-uniform spline curve comprises the following steps:
[0031] S1. Establish a dynamic obstacle model, and plan a straight line path connecting the starting point and the ending point.
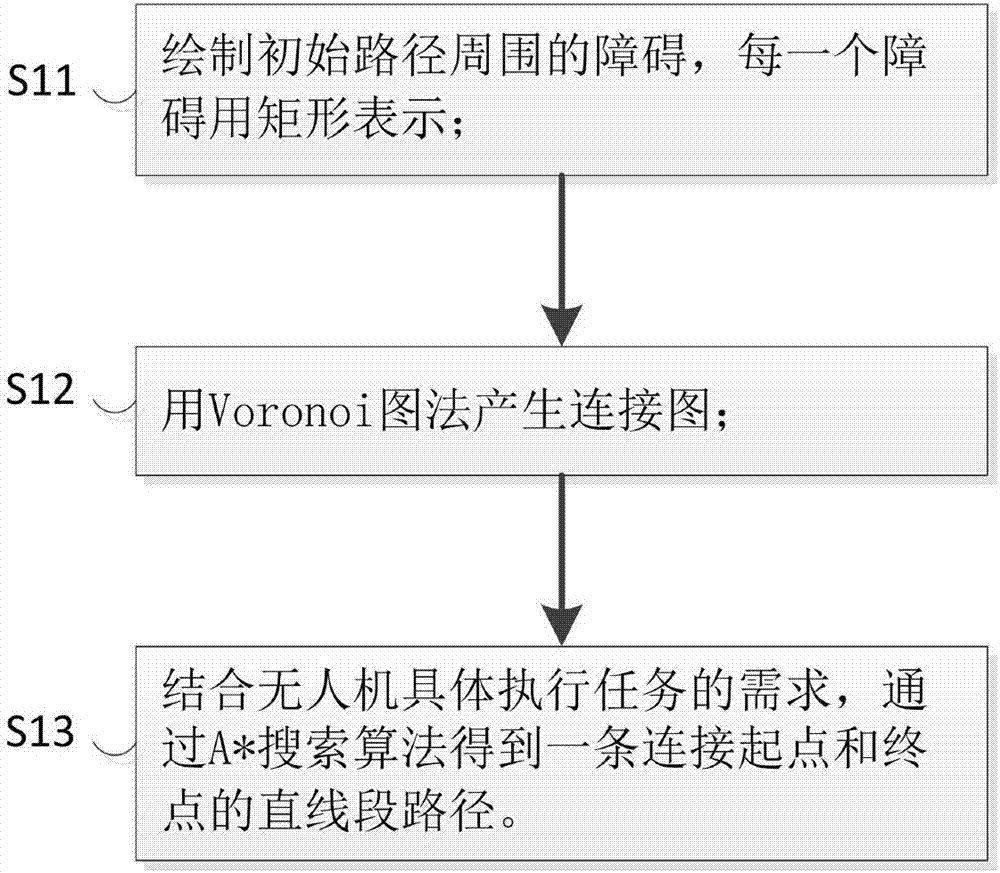
[0032] Specific as image 3 As shown, the step S1 includes the following sub-steps:
[0033] S11. Draw obstacles around the initial path, each obstacle is represented by a...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap