Water ship trajectory tracking control method for actuator asymmetric saturation
A technology of trajectory tracking and control method, applied in non-electric variable control, two-dimensional position/channel control, control/regulation system and other directions, which can solve the problems of system instability, actuator saturation, asymmetric saturation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0084] Below each part design method in the present invention is further described:
[0085] The present invention "a track tracking control method for surface warships with asymmetric saturation of actuators", the specific steps are as follows:
[0086] Step 1: Given expected tracking value
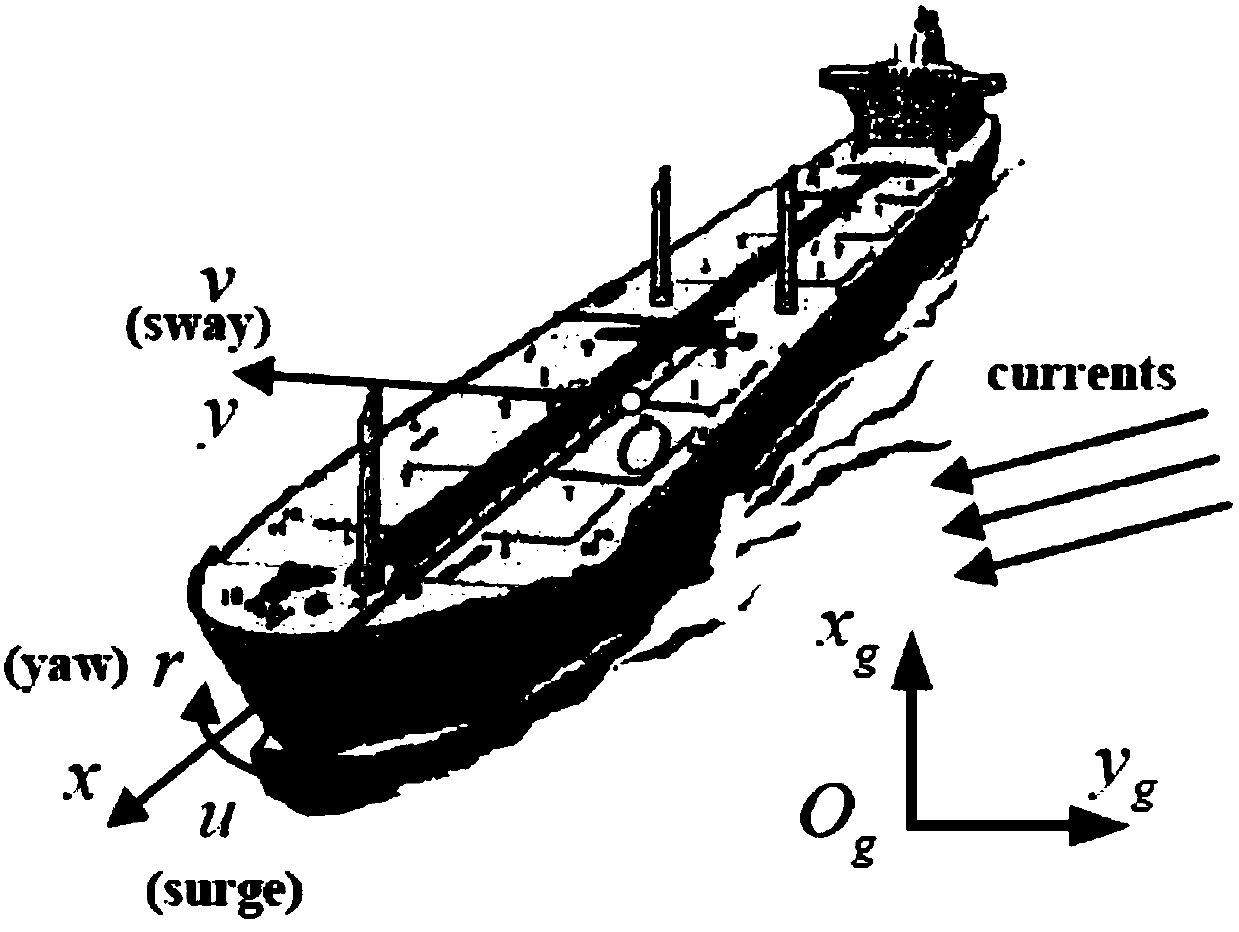
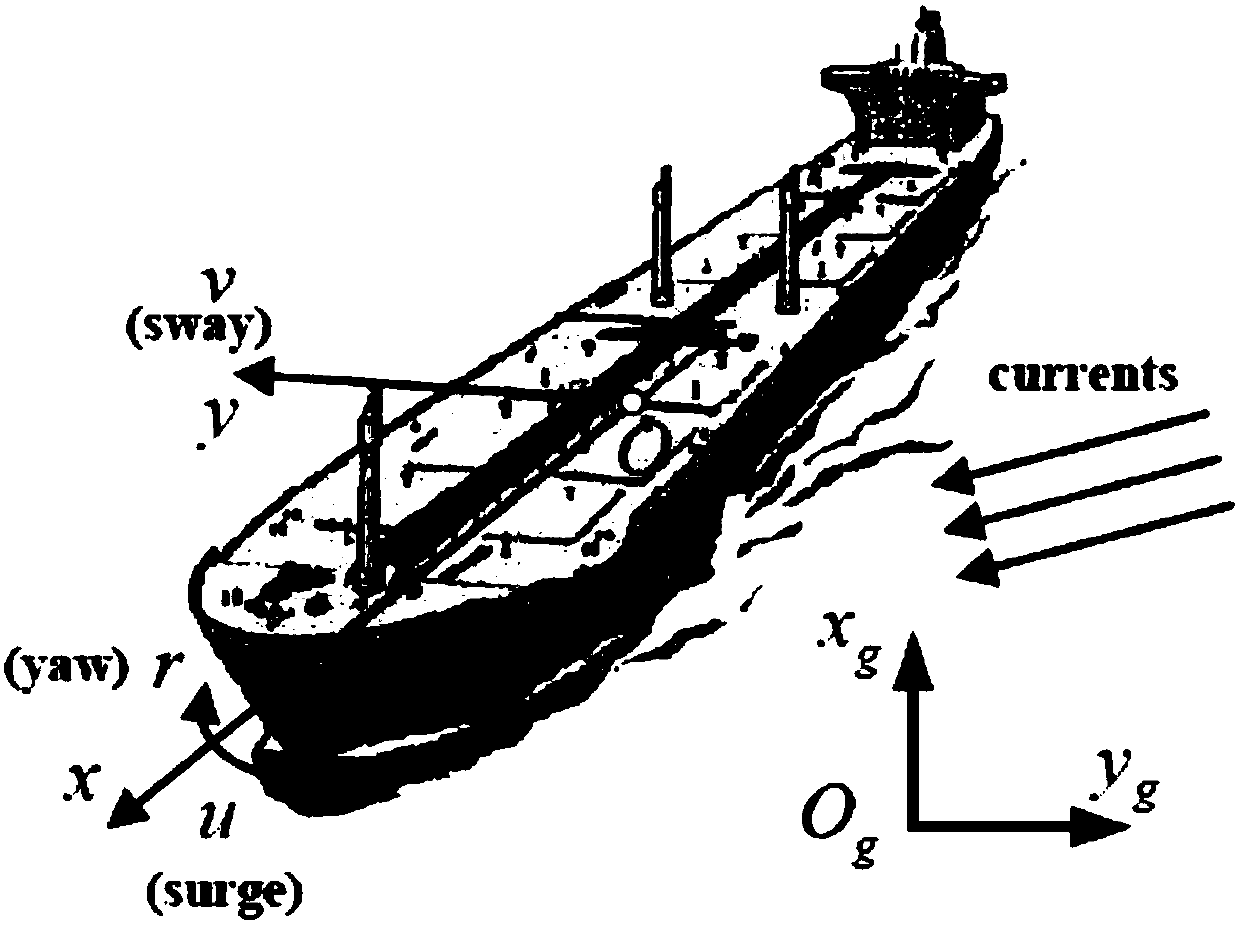
[0087] 1) if figure 1 As shown, take a fixed point as the origin, the x-axis points to the north, and the y-axis points to the east to establish an inertial coordinate system; take the structural geometric center in the surface ship model as the origin, the x-axis points to the head of the ship, and the y-axis is vertical On the x-axis, a body coordinate system is established.
[0088] 2) The given expected trajectory is η d =[x d ,y d ,ψ d ] T , the meaning of the three components is: (x d ,y d ) represents the desired plane position, ψ d Indicates the desired yaw angle.
[0089] Step 2: Calculate the trajectory tracking error z 1
[0090] z 1 =η-η d
[0091] Step 3: Des...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com