Neutral buoyancy robot pose and trajectory control method based on active disturbance rejection
A trajectory control and robot technology, applied in attitude control, adaptive control, two-dimensional position/channel control, etc., can solve the problems of viscous resistance, attitude and trajectory control, and mutual coupling of neutral buoyancy robots.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
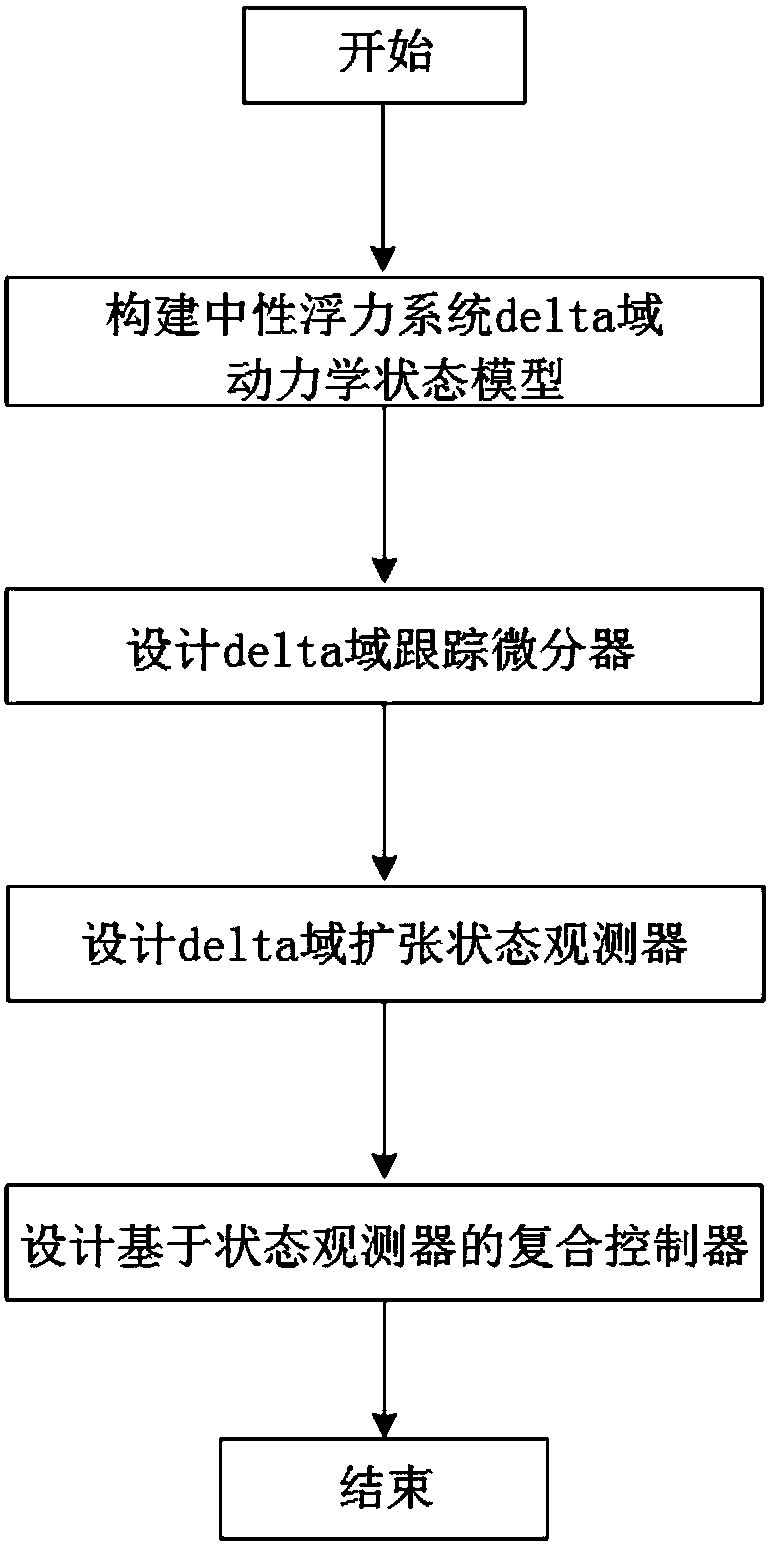
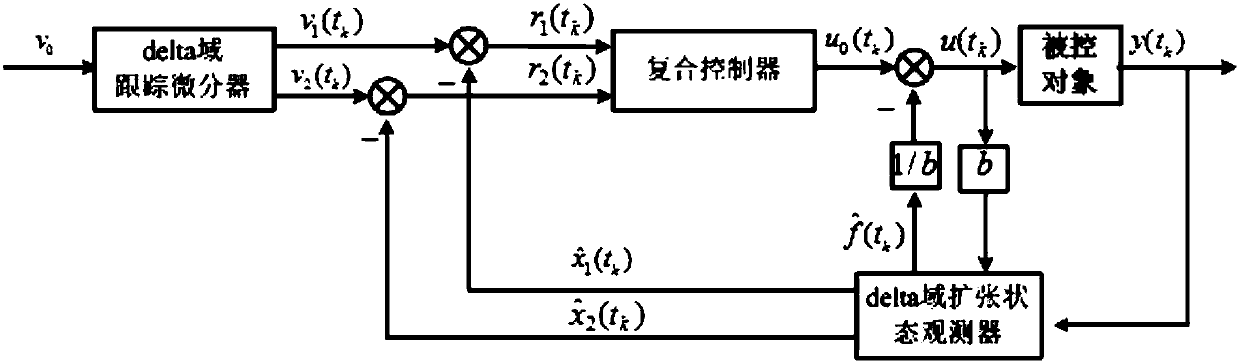
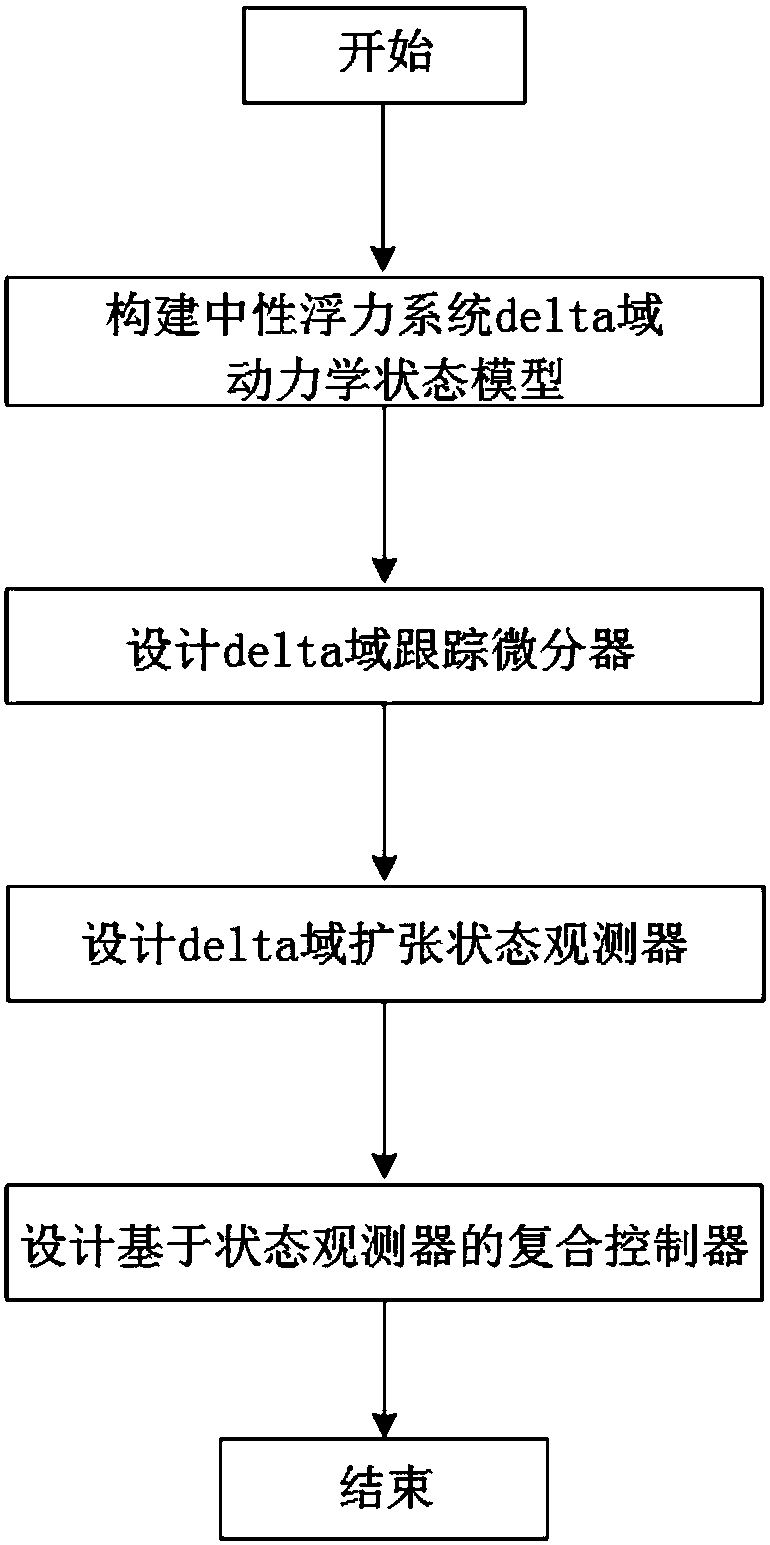
[0047] The present invention provides a neutral buoyancy robot posture and trajectory control method based on the self-disturbance rejection theory, aiming at the poor anti-interference ability of the robot in the neutral buoyancy system and the rounding error problem caused by the limited word length, first using the delta operator theory , to construct the dynamic state equation of the neutral buoyancy system delta domain. Secondly, design a delta field tracking differentiator to arrange the transition process of the input signal. Thirdly, aiming at the water resistance in the neutral buoyancy system and the coupling terms between the various control forces, a delta domain expansion state observer is designed. Finally, using the output state of the tracking differentiator and the estimated state of the extended state observer, a compound anti-jamming controller is designed to complete the attitude and trajectory control of the robot in the neutral buoyancy system.
[0048] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com