Wing deformation type bionic unmanned aerial aircraft and deformation control method
A technology of unmanned aerial vehicles and wings, which is applied in the field of unmanned aerial vehicles to achieve the effects of improving wind resistance and maneuverability, improving aerodynamic efficiency, and increasing flight stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
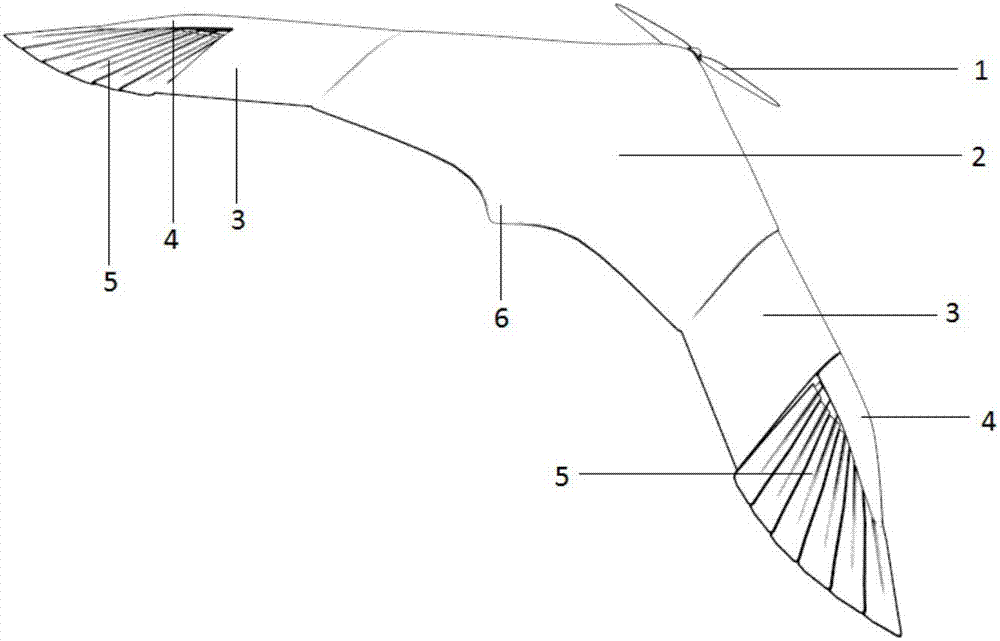
[0017] The present invention adopts the wing body fusion flying wing layout configuration scheme, which is composed of 6 major functional components. Such as figure 1 As shown, it consists of six functional parts including propeller 1, fixed wing body fusion wing section 2, telescopic wing section 3, folding wing control mechanism 4, bionic wing 5 and stabilized tail section 6. In addition to being the main force-bearing structure of the entire aircraft, the fixed-wing-body fused wing section 2 is mainly used to load electromechanical equipment such as power systems, flight control systems, deformation-structure servo drive motors, and payloads. The propeller 1 is mechanically connected to the fixed wing-body fused wing section 2 at the head through a rotating shaft, and a DC motor provides rotational driving force to control the rot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com