Dual quaterion inertia/astronomy combined navigation method based on gyroscope error correction
A dual quaternion, combined navigation technology, used in astronomical navigation, navigation through velocity/acceleration measurement, measurement devices, etc., can solve the problems of increasing computer computing burden, poor real-time performance, and high dimension of the navigation system, reducing computing power. Quantity, improve accuracy, high precision effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach
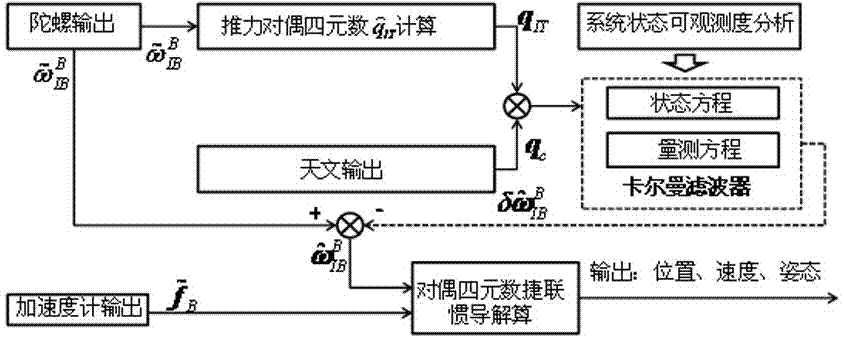
[0076] 1. Establish the state equation of the dual quaternion inertial / astronomical integrated navigation system
[0077] (1.1) Gyro and accelerometer error modeling
[0078] Gyro error and accelerometer error include constant error and Gaussian white noise random error, and the error model can be regarded as a linear model composed of various error sources, so the gyro and accelerometer error model is:
[0079]
[0080] In formula (1), is the gyro error, is the gyro constant drift error, is the gyro Gaussian white noise; δf B is the accelerometer error, is the accelerometer constant error, is acceleration white Gaussian noise.
[0081] (1.2) State equation of integrated navigation system based on gyroscope and accelerometer error model
[0082] The constant error of the gyroscope and accelerometer is extended to the system state quantity, thus the state equation of the dual quaternion inertial / astronomical integrated navigation system is obtained:
[0083]
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com