Nonlinear path planning method based on hybrid pigeon population algorithm
A technology of trajectory planning and swarm algorithm, applied in the directions of calculation, calculation model, navigation calculation tool, etc., can solve the problems of slow trajectory planning and local optimality of UAVs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
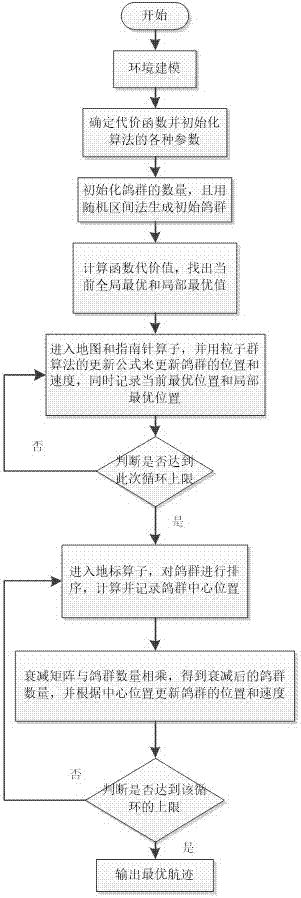
[0030] Below in conjunction with specific embodiment the present invention is described in further detail:
[0031] 1) Express the two-dimensional planning space of UAV flight environment planning as a geometric space area , and determine the starting coordinate point of the flight start (startx, starty), the target point target (targetx, targety);
[0032] 2) Model the threat in the flight mission: convert the threat index such as the geographic location, influence range, and threat level into the matrix information of the discrete planning space. This mainly refers to the radar threat, using a A matrix with four rows and four columns to store threat information, where Represents the number of threats, the first column represents the abscissa of the threat, the second column represents the ordinate of the threat, the third column represents the radius of the threat, and the fourth column represents the level of the threat;
[0033] 3) Initialize various parameters of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com