Path planning method and device for angular movement
A path planning and angle technology, applied in program control, instrumentation, electrical program control, etc., can solve problems such as high time consumption and low efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The present invention is further illustrated below by means of examples, but the present invention is not limited to the scope of the examples.
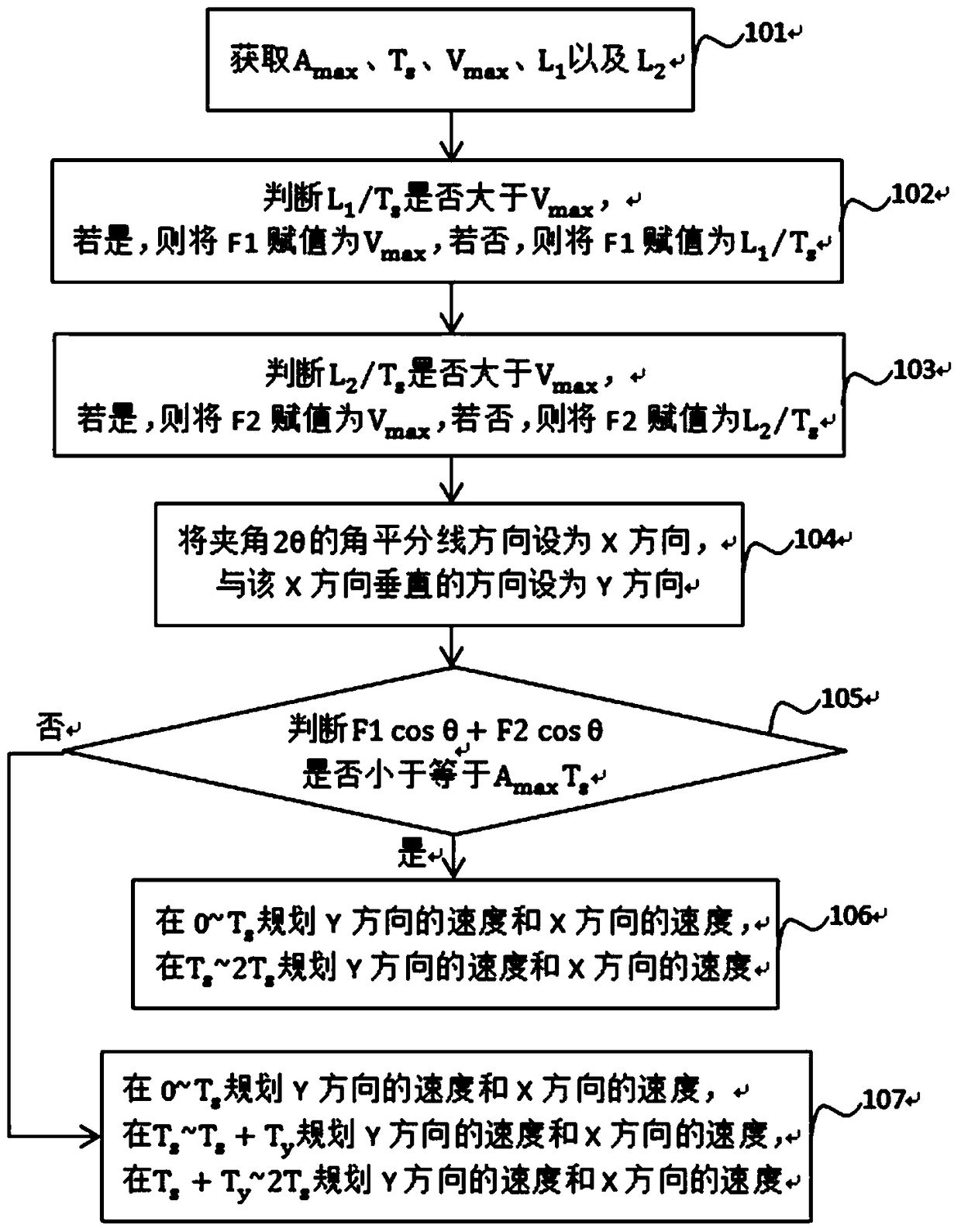
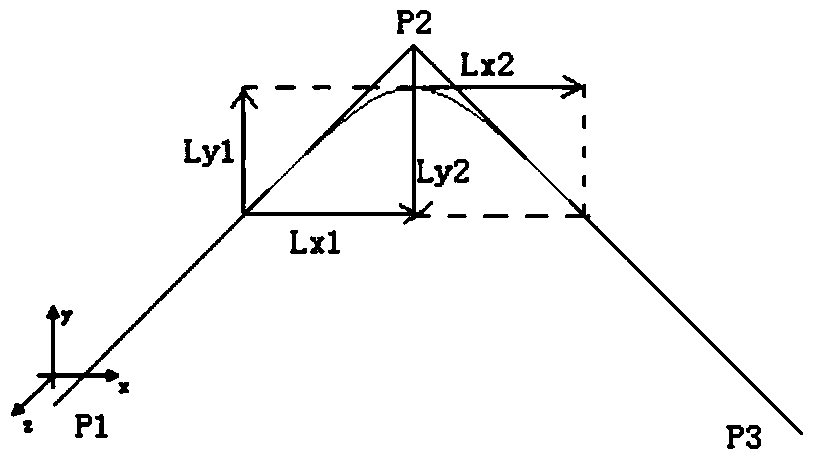
[0057] A path planning method for angular movement, the angle 2θ of the angular movement is formed by the first path and the second path, and 0°figure 1 As shown, the path planning method includes the following steps:
[0058] Step 101. Obtain the acceleration limit value A max , Acceleration change time T s , speed limit value V max , the distance L of the first path 1 and the distance L of this second path 2 ;
[0059] Step 102, judge L 1 / T s Is it greater than V max , if so, assign the speed F1 of the first midpoint as V max , if not, assign the speed F1 of the first midpoint as L 1 / T s , the first midpoint is the midpoint of the first path;
[0060] Step 103, judge L 2 / T s Is it greater than V max , if so, assign the speed F2 of the second midpoint as V max , if not, assign the speed F2 of the second midp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com