Swinging arm type tracked robot
A crawler robot and swing arm technology, applied in the field of robotics, can solve problems such as the complex environment of the search site
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
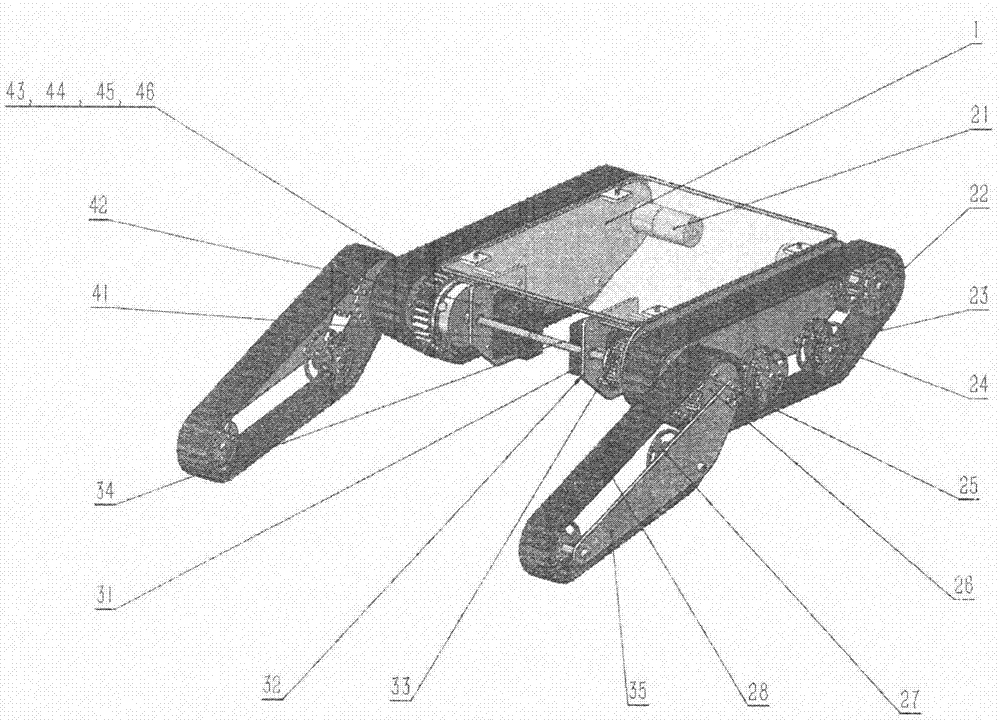
[0017] see figure 1 , a swing arm type crawler robot, including a frame 1, a transmission mechanism, a swing arm mechanism and a locking mechanism, and the transmission mechanism also includes a DC motor 21, a main track drive wheel 22, a main track load wheel 23, and a main crawler belt 24 , side track 28, driven wheel 25, auxiliary driving wheel 26 and side track wheel 27. The transmission mechanism is located on both sides of the frame 1. connected, the main track wheels 23 are evenly distributed on both sides of the frame 1, the driven wheels 25 are located on the front side of the frame 1, the driven wheels 25 and the auxiliary driving wheels 26 are fixedly connected by connecting pieces, and the driven wheels The center of rotation of the driving wheel 25 and the auxiliary drive 26 passes through the rotating shaft 34 of the swing arm me...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com