Unmanned aerial vehicle (UAV) formation control algorithm based on Lagrange's equation
A control algorithm and unmanned aerial vehicle technology, applied in the direction of non-electric variable control, control/regulation system, three-dimensional position/channel control, etc., can solve the problems of narrow detection range, difficult to complete, and difficulties
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] A UAV formation control algorithm based on the Lagrangian equation proposed by the present invention will be described in detail below in conjunction with the accompanying drawings.
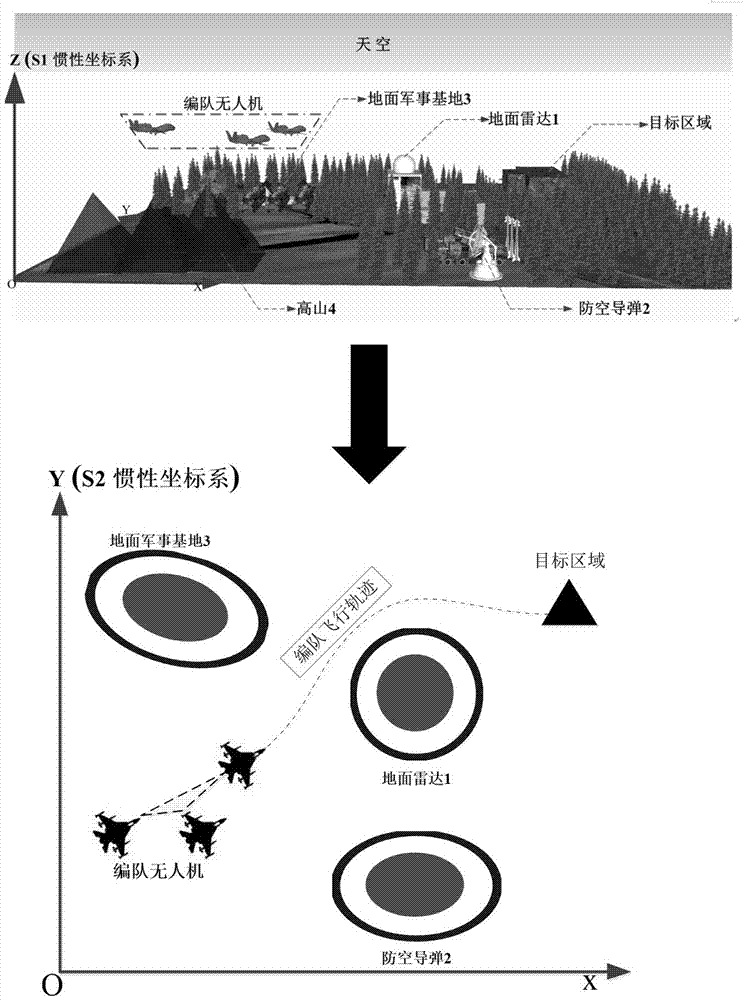
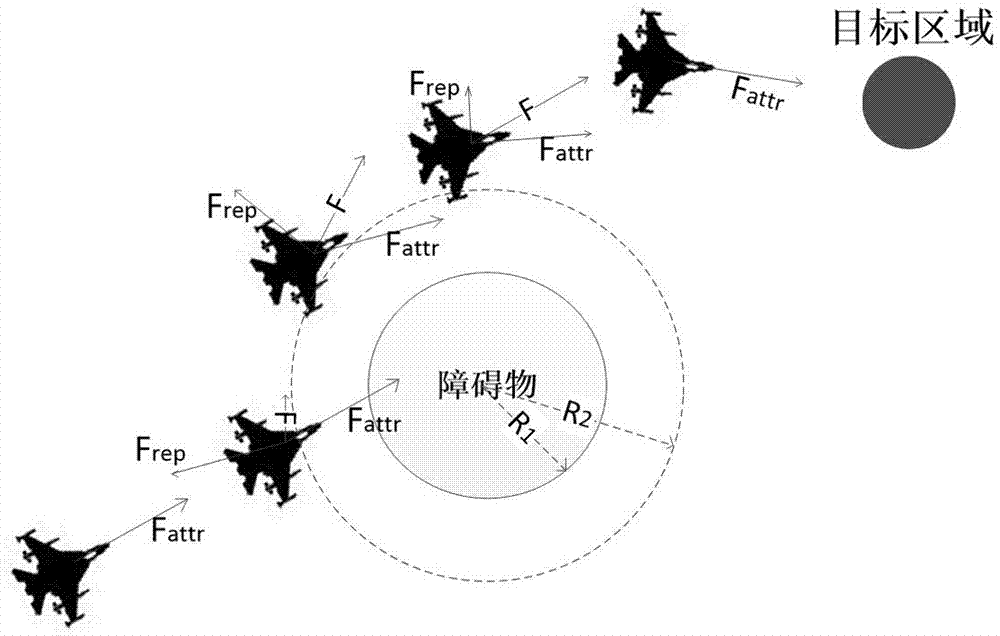
[0050] like figure 1 As shown, a typical operating environment of the UAV formation control algorithm based on the improved artificial potential energy field and Lagrangian equation disclosed by the present invention includes ground radar 1, air defense missile 2, ground military base 3 and obstacle 4, Formation drones 5, target areas 6, etc. Among them, R1 represents the radius of the abstract obstacle, and R2 represents the influence range of the obstacle. Here it is required that the formation UAVs can bypass all obstacles in formation and reach the target area smoothly. When performing simplification, the present invention simplifies the movement of formation unmanned aerial vehicles to an abstract plane movement, and requires formation unmanned aerial vehicles to bypass all obstacle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com